数组、链表与哈希表
1. 数据结构的选择:一切从存储开始
在计算机中,数据的组织方式决定了算法的效率。本章介绍的三种基础数据结构——数组、链表和哈希表——几乎出现在所有非平凡的程序中。理解它们的底层原理和性能权衡,是写出高效代码的第一步。
核心问题:数据在内存中如何存放?这直接决定了:
- 按索引访问有多快?
- 在中间插入/删除有多快?
- 搜索一个值需要多长时间?
2. 动态数组(Dynamic Array)
2.1 静态数组的局限
传统的 C 风格数组大小在编译时就固定了:
int arr[100]; // 最多只能存 100 个元素这在实际编程中很不方便——你通常不知道预先需要多大空间。动态数组通过在底层自动扩容来解决这个问题。
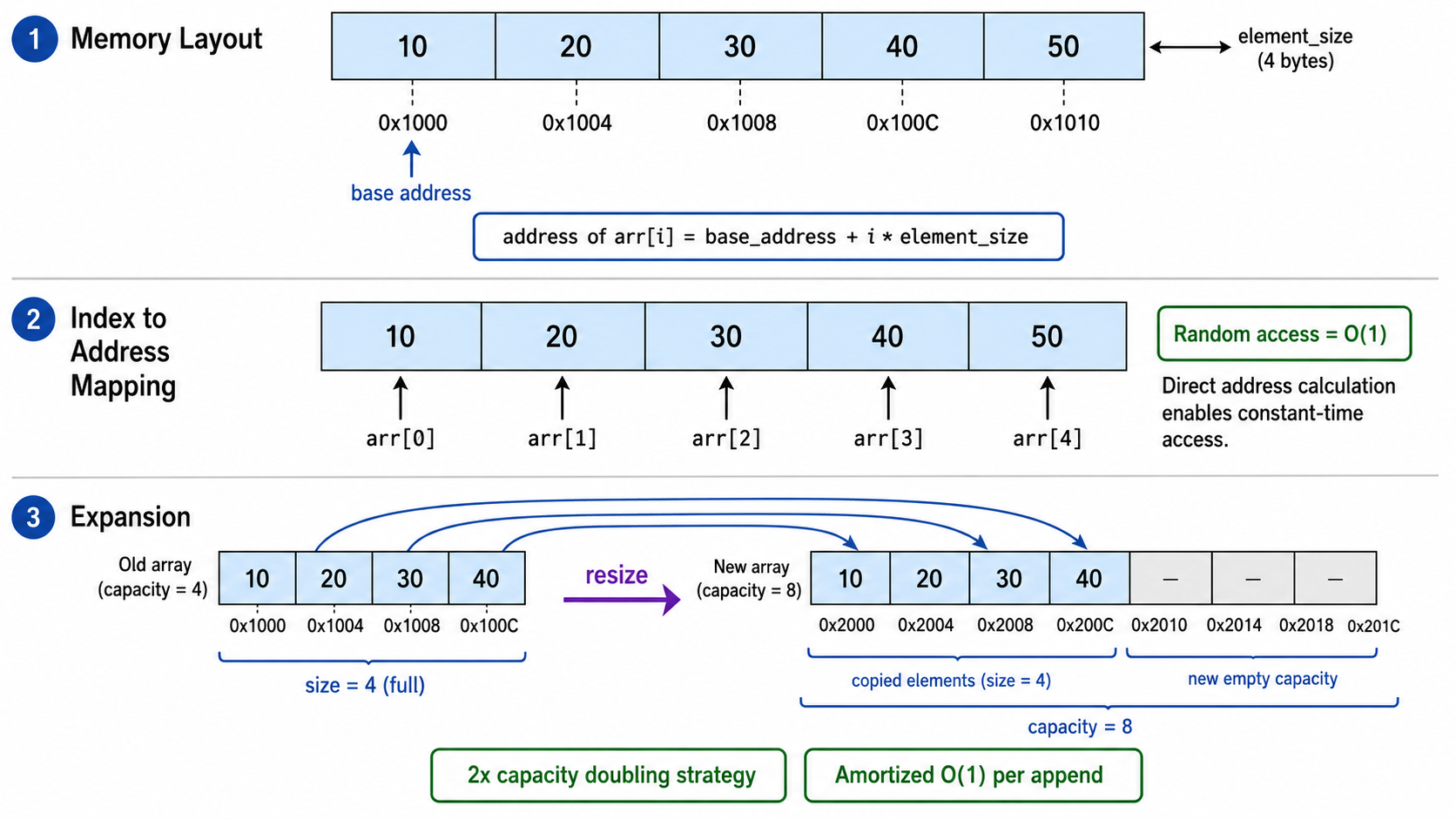
2.2 动态数组的原理
动态数组(Python 的 list、C++ 的 vector、Java 的 ArrayList)的核心思想:
- 底层维护一个比当前元素数量更大的定长数组
- 当元素填满底层数组时,分配一个更大的数组(通常翻倍),复制所有旧元素
- 看起来可以"无限"追加,但实际上是靠均摊做到的
class DynamicArray:
_capacity = 1 # 底层数组的容量
_size = 0 # 当前元素个数
_data = [None] # 底层定长数组2.3 均摊 O(1) 的 append
第一章已详细分析了动态数组的均摊分析,核心结论是:虽然扩容操作是
2.4 数组操作复杂度
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 按索引访问 | 内存连续,直接计算地址 | |
| 末尾追加 | 扩容时才是 | |
| 中间插入 | 需要搬移后续元素 | |
| 中间删除 | 同上 | |
| 搜索 | 最坏需遍历整个数组 |
数组的优势是随机访问
3. 链表(Linked List)
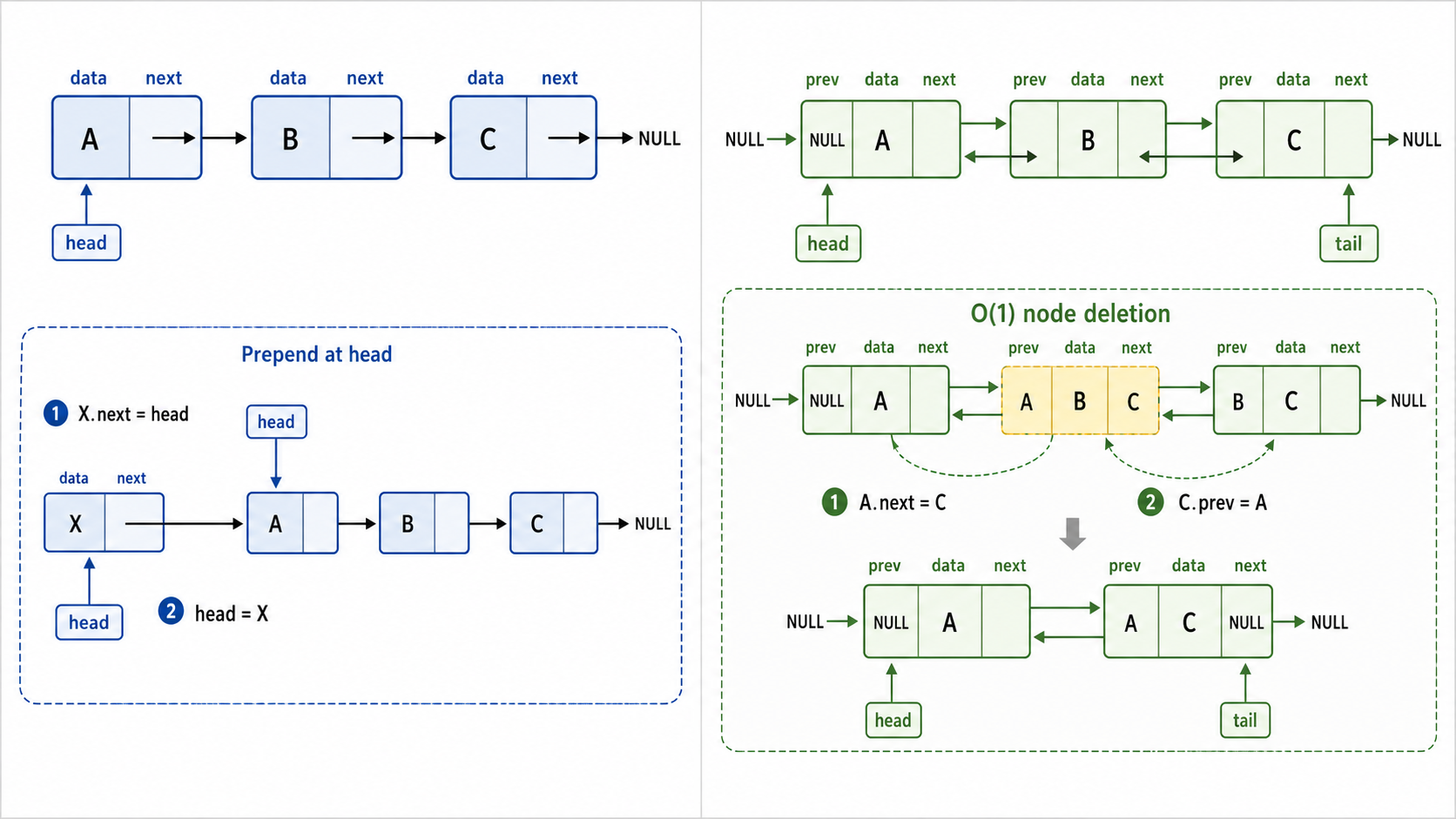
3.1 单链表(Singly Linked List)
链表与数组截然不同——每个元素(节点)散落在内存各处,靠指针串联:
[data|next] → [data|next] → [data|next] → None
head节点定义:
class Node:
data: int
next: Node | None单链表的核心操作:
| 操作 | 时间复杂度 | 说明 |
|---|---|---|
| 头部插入 | 只需修改 head 指针 | |
| 尾部插入 | 需要遍历到末尾(无尾指针时) | |
| 按值查找 | 必须从头遍历 | |
| 删除 | 需要找到前驱节点 |
对于单链表,删除「当前」节点需要知道其前驱(除非使用"复制后继值再删除后继"的技巧)。
3.2 双链表(Doubly Linked List)
双链表每个节点有两个指针:
class Node:
data: int
prev: Node | None
next: Node | None增加 prev 指针后,删除操作变得
None ← [prev|data|next] ↔ [prev|data|next] ↔ [prev|data|next] → None3.3 数组 vs. 链表:何时用哪个?
| 维度 | 数组 | 链表 |
|---|---|---|
| 随机访问 | ||
| 头部插入/删除 | ||
| 尾部插入/删除 | ||
| 中间插入/删除 | ||
| 内存占用 | 紧凑(无指针开销) | 每个节点多 1-2 个指针 |
| 缓存友好 | 优秀(连续内存) | 差(跳跃访问) |
| 内存分配 | 可能浪费(预留容量) | 按需分配 |
选择法则:需要频繁随机访问 → 数组;频繁在中间增删 → 链表;两者都需要 → 考虑跳跃表或平衡树。
4. 哈希表(Hash Table)
4.1 核心思想:用空间换时间
哈希表的目标是实现
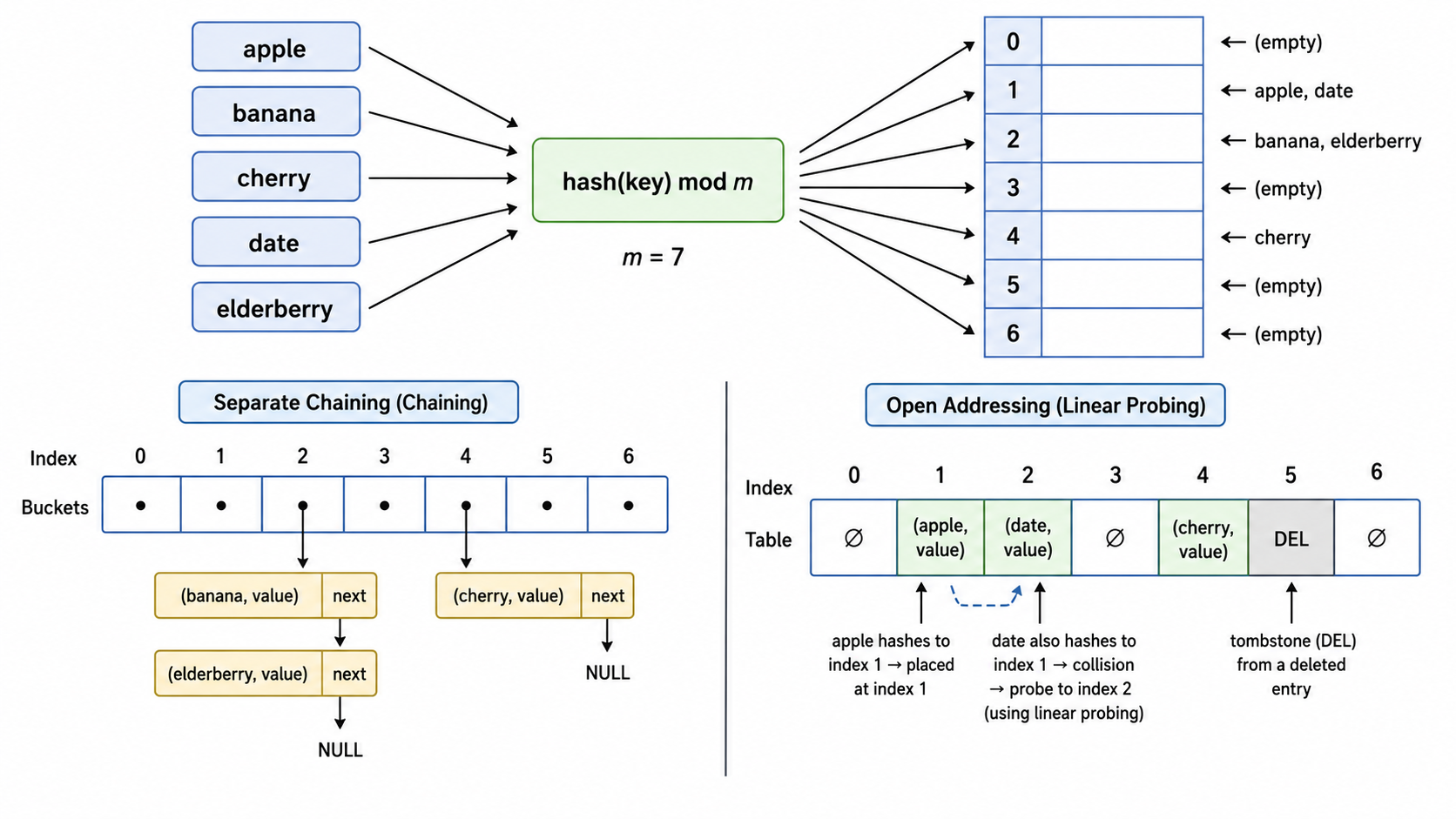
- 哈希函数:将任意类型的键
映射到一个整数索引 - 数组(桶):大小为
的数组,每个位置可存储一个或多个条目 - 冲突解决机制:当两个不同键映射到同一索引时如何处理
4.2 哈希函数设计
一个好的哈希函数应该是:
- 确定性:同一个键总是产生同样的哈希值
- 均匀性:哈希值均匀分布在
范围内 - 高效:计算速度快(
) - 雪崩效应:输入微小变化导致输出剧烈变化
除法哈希法
最简单的方法。
乘法哈希法
其中
全域哈希(Universal Hashing)
从一族哈希函数中随机选取一个。一族函数
全域哈希可以保证期望性能,与输入分布无关。这在对抗性输入(攻击者故意构造碰撞)的场景中非常重要。
4.3 冲突解决
链地址法(Separate Chaining)
每个桶是一个链表(或其他数据结构)。冲突的条目追加到链表中。
桶 0: [k1,v1] → [k2,v2]
桶 1: (空)
桶 2: [k3,v3]
...- 查找:先计算
,在对应的链表中顺序搜索 → 最坏 (全部冲突),平均 ,其中 是负载因子 - 插入:同上,通常插在链表头部 →
开放地址法(Open Addressing)
所有条目都存储在数组本身中。当发生冲突时,探测下一个位置。
线性探测:
优点:缓存友好(连续访问)。缺点:一次聚集(primary clustering)——连续被占用的槽会越来越长。
二次探测:
减少了一次聚集,但可能导致二次聚集(secondary clustering)。
双哈希:
其中
删除在开放地址法中需要特殊处理——不能简单地把槽置空,否则会"切断"探测链。常用方法是使用一个特殊的"已删除"标记(tombstone)。
4.4 负载因子与扩容
负载因子
当
5. LRU 缓存:哈希表 + 双链表的经典组合
5.1 什么是 LRU?
LRU(Least Recently Used)缓存是一种缓存淘汰策略:当缓存满时,淘汰最久未使用的那个条目。
LRU 缓存需要支持两种操作,都必须在
get(key):获取键对应的值,并将该条目标记为「最近使用」put(key, value):插入或更新,若缓存满则先淘汰最久未使用的条目
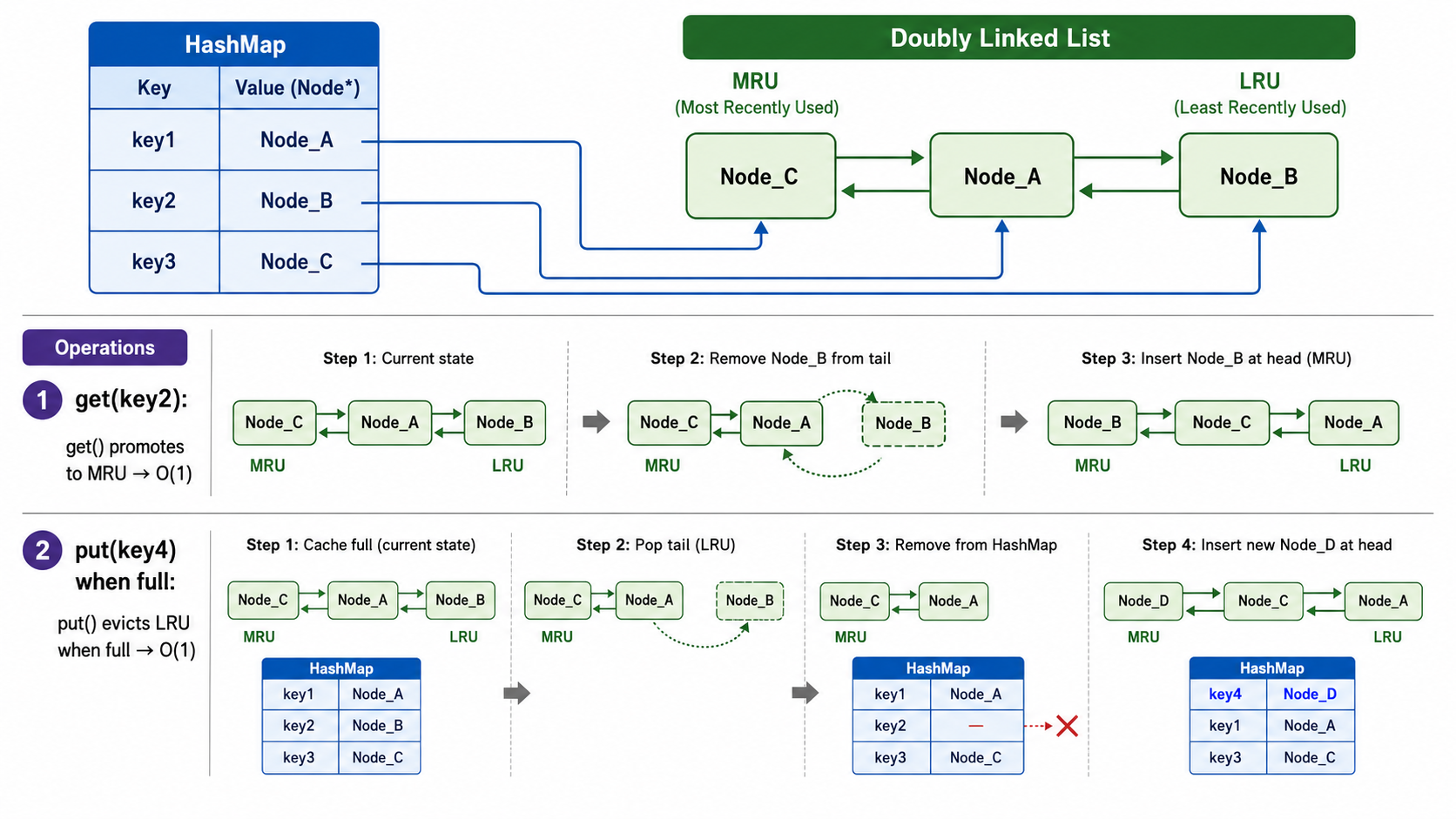
5.2 为什么需要两种数据结构组合?
- 哈希表提供
的键查找——给定 key,快速定位到节点 - 双链表维护使用顺序——头部是最近使用的,尾部是最久未使用的
哈希表: {key1 → Node1, key2 → Node2, ...}
双链表: (MRU) Node3 ↔ Node1 ↔ Node2 (LRU)
最近使用 → ... → 最久未使用5.3 LRU 操作详解
get(key):
- 在哈希表中查找 key → 找到对应节点
- 将该节点从双链表的当前位置移除
- 将该节点插入双链表头部(标记为「最近使用」)
- 返回节点的 value
put(key, value):
- 如果 key 已存在:更新 value,将节点移到头部
- 如果 key 不存在:
- 若缓存已满:删除双链表尾部的节点,从哈希表中移除
- 创建新节点,插入双链表头部,加入哈希表
复杂度:每一步都是
本章总结
本章介绍了三种最基础也最重要的数据结构:
- 动态数组:随机访问
,末尾追加 均摊,通过 2 倍扩容策略实现 - 链表:插入删除
(定位后),但不支持随机访问。单链表节省空间,双链表删除更方便 - 哈希表:查找、插入、删除均
平均,通过哈希函数 + 冲突解决实现 - LRU 缓存:哈希表 + 双链表的经典组合,展示了如何组合不同数据结构解决复杂问题
理解这些数据结构的底层实现,远比只会调用 API 重要——当你遇到性能瓶颈时,正是这些知识帮助你做出正确的选择。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Cormen, T. H., Leiserson, C. E., Rivest, R. L., & Stein, C. (2009). Introduction to Algorithms (3rd ed.). MIT Press. 第 10、11 章
- Sedgewick, R., & Wayne, K. (2011). Algorithms (4th ed.). Addison-Wesley. 第 3 章
- Knuth, D. E. (1998). The Art of Computer Programming, Vol. 3: Sorting and Searching (2nd ed.). Addison-Wesley.
上一章:复杂度分析与渐进记号下一章:栈与队列