ml08 聚类:无监督学习的核心
当数据没有标签时,如何发现其中的隐藏结构?K-Means、DBSCAN、层次聚类——三种思维,三种哲学。
一、什么是聚类?
聚类(Clustering) 是无监督学习的核心任务之一。与分类不同,聚类不需要标签——它直接在数据空间中寻找"物以类聚"的天然结构,将相似的数据点归入同一簇(cluster),将不相似的点分开。
形式化地说,给定数据集
聚类问题的两个核心问题:
- 如何度量相似性?——距离度量(欧氏距离、余弦相似度、马氏距离等)
- 如何定义"簇"?——不同的算法对"什么是簇"有不同的定义
直觉类比:想象你在一个漆黑的房间里,地上散落着很多硬币、纽扣和弹珠。你看不到它们的标签,但你可以通过触摸(计算距离)把它们分成三堆——大小相似的放一起。聚类就是让计算机自动做这件事。
二、K-Means:最经典的划分方法
2.1 核心思想
K-Means 假设簇是球形的、大小相近的,并将每个簇表示为一个质心(centroid)——簇内所有点的均值向量。
K-Means 试图最小化簇内平方误差(Within-Cluster Sum of Squares, WCSS):
其中
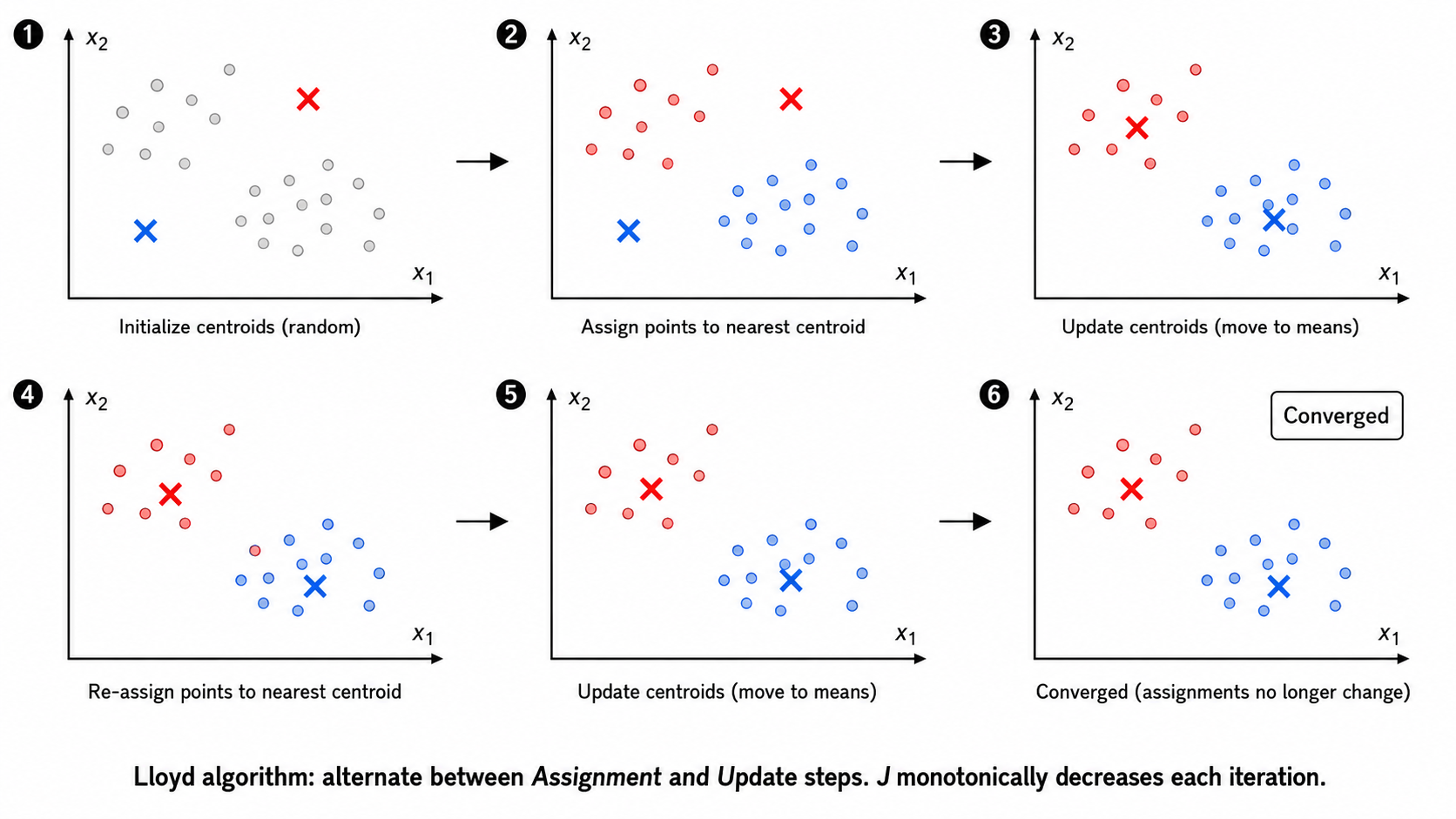
2.2 Lloyd 算法
K-Means 的标准求解算法由 Stuart Lloyd 于 1957 年提出(比 K-Means 这个名字的出现还早!)。它是一个交替优化的过程:
步骤 1:分配(Assignment)——固定质心,分配样本
每个样本被分配给距离最近的质心所属的簇。
步骤 2:更新(Update)——固定分配,更新质心
每个簇的质心被更新为该簇所有样本的均值。
收敛性:每轮迭代中,分配步骤和更新步骤都能保证
Lloyd 算法的本质:它其实是 EM 算法 在硬分配(hard assignment)下的特例——分配步骤对应 E 步(推断隐变量),更新步骤对应 M 步(最大化似然)。
2.3 K-Means++ 初始化
标准 K-Means 对初始质心非常敏感——不好的初始化可能导致收敛到很差的局部最优。K-Means++ 通过一种巧妙的概率采样策略大大改善了初始化:
- 从数据集中均匀随机选择第一个质心
- 对于每个点
,计算它到最近已选质心的距离 - 以概率
选择下一个质心——距离越远的点越可能被选中 - 重复步骤 2-3,直到选出
个质心
K-Means++ 保证了初始质心尽可能"分散",使得算法更可能收敛到好的局部最优。数学上可以证明,K-Means++ 给出的初始目标函数值的期望不超过最优解的
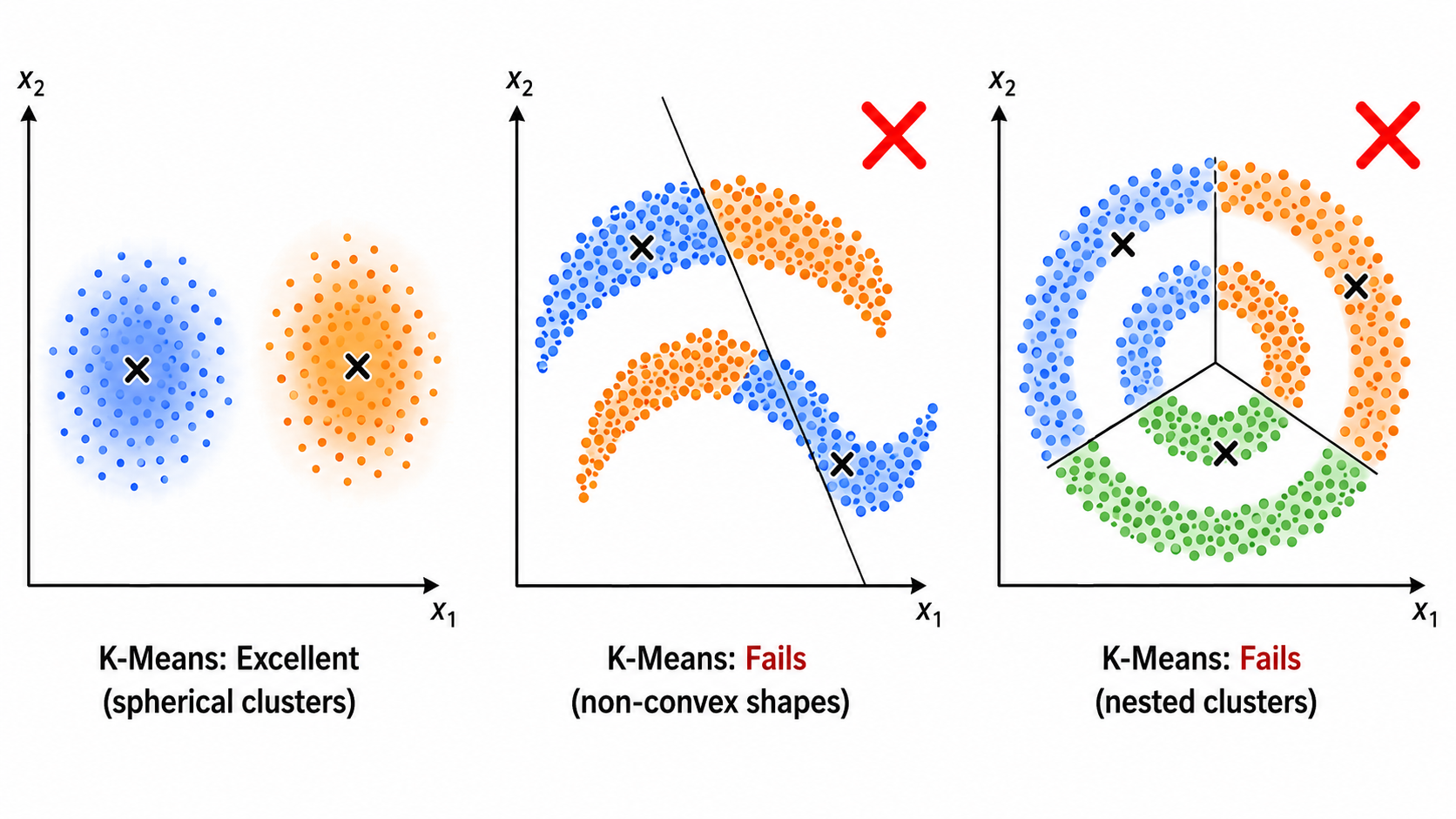
2.4 K-Means 的局限性
| 局限 | 说明 |
|---|---|
| K 必须预先指定 | 不知道 K 时需要用肘部法则或轮廓系数等辅助选择 |
| 假设簇是球形的 | 对细长形、环形、月牙形的簇无能为力 |
| 对初始值敏感 | 不同初始化可能收敛到不同的局部最优 |
| 对异常值敏感 | 异常值会显著拉偏质心位置 |
| 只能处理凸形簇 | 无法处理嵌套结构(如同心圆) |
三、DBSCAN:基于密度的聚类
3.1 核心思想
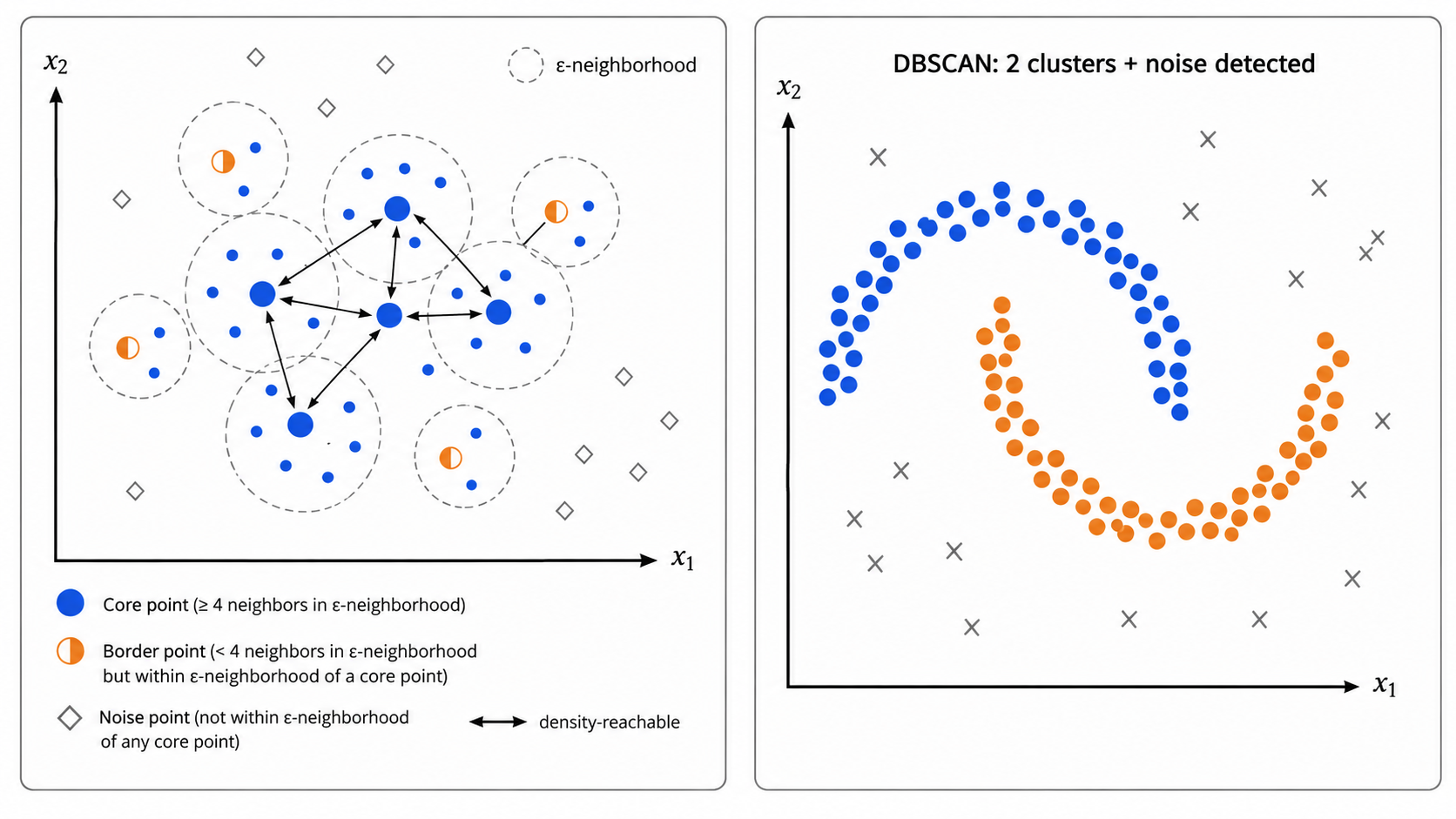
DBSCAN(Density-Based Spatial Clustering of Applications with Noise)用完全不同的哲学定义簇:簇是密度相连的点的最大集合。它可以在噪声中发现任意形状的簇,且不需要预先指定簇的数量。
DBSCAN 的两个核心参数:
(eps):邻域半径——定义"附近"的范围 - minPts:最小邻居数——定义一个点是否在"密集区域"的阈值
3.2 三种点的定义
对于数据集中的任意点
根据
| 类型 | 条件 | 含义 |
|---|---|---|
| 核心点(Core Point) | 点在密集区域内部 | |
| 边界点(Border Point) | 点在簇的边缘 | |
| 噪声点(Noise Point) | 既非核心点也非边界点 | 离群点,不属于任何簇 |
3.3 密度相连与簇的定义
几个递进的概念:
- 直接密度可达(Directly Density-Reachable):
是核心点,且 ,则 从 直接密度可达 - 密度可达(Density-Reachable):存在核心点链
,使得 从 直接密度可达 - 密度相连(Density-Connected):存在点
,使得 和 都从 密度可达
DBSCAN 对簇的定义:一个簇是满足以下两个条件的非空子集
- 极大性:对所有
和所有从 密度可达的 ,有 - 连接性:对所有
, 和 是密度相连的
3.4
minPts 的经验法则:
- 对每个点,计算它到第
近邻的距离 - 将这些距离从小到大排序后绘图
- 选择曲线"拐点"处的距离作为
拐点的直觉:拐点之前的距离对应簇内点(距离小),拐点之后对应噪声点(距离大)。
3.5 DBSCAN 的优势与局限
| 优势 | 局限 |
|---|---|
| 不需要预先指定 K | 对参数 |
| 可以发现任意形状的簇 | 密度差异大时难以选择全局 |
| 天然具备异常检测能力 | 高维数据中距离度量失效(维度灾难) |
| 对噪声鲁棒 | 时间复杂度 |
四、层次聚类
4.1 两种范式
层次聚类不产生"扁平"的划分,而是构建一棵层次树(dendrogram,谱系图),展示数据从每个点自成一簇到所有点合为一簇的完整合并/分裂过程。
AGNES(AGglomerative NESting)——自底向上(凝聚):
- 初始:每个点是一个独立的簇
- 重复:找到最相似的两个簇,合并它们
- 终止:只剩一个簇(或达到指定簇数)
DIANA(DIvisive ANAlysis)——自顶向下(分裂):
- 初始:所有点在一个簇中
- 重复:选择一个簇,将其分裂为两个子簇
- 终止:每个点是一个独立的簇(或达到指定簇数)
AGNES 比 DIANA 常用得多,因为分裂策略的计算复杂度更高。
4.2 簇间距离的四种定义(Linkage Criterion)
在 AGNES 中,决定"合并哪两个簇"的关键是**簇间距离(linkage)**的定义:
| 方法 | 定义 | 效果 |
|---|---|---|
| Single Linkage(最小距离) | 倾向产生细长、链状的簇(链式效应) | |
| Complete Linkage(最大距离) | 倾向产生紧凑、球形的簇 | |
| Average Linkage(平均距离) | 折中,对噪声更鲁棒 | |
| Ward's Method | 最小化合并后的方差增量 | 倾向产生大小相近的簇,与 K-Means 目标函数一致 |
Single vs Complete Linkage 几何直觉:Single linkage 只关心两个簇最近的两个点——只要簇的"触角"碰到了一起就合并,导致它可能把两个明显分离的簇通过中间的噪声点"桥接"起来。Complete linkage 要求两个簇的所有点都彼此靠近——这要求簇的"最远两端"也足够近,产生更紧凑的结果但可能过度分割。
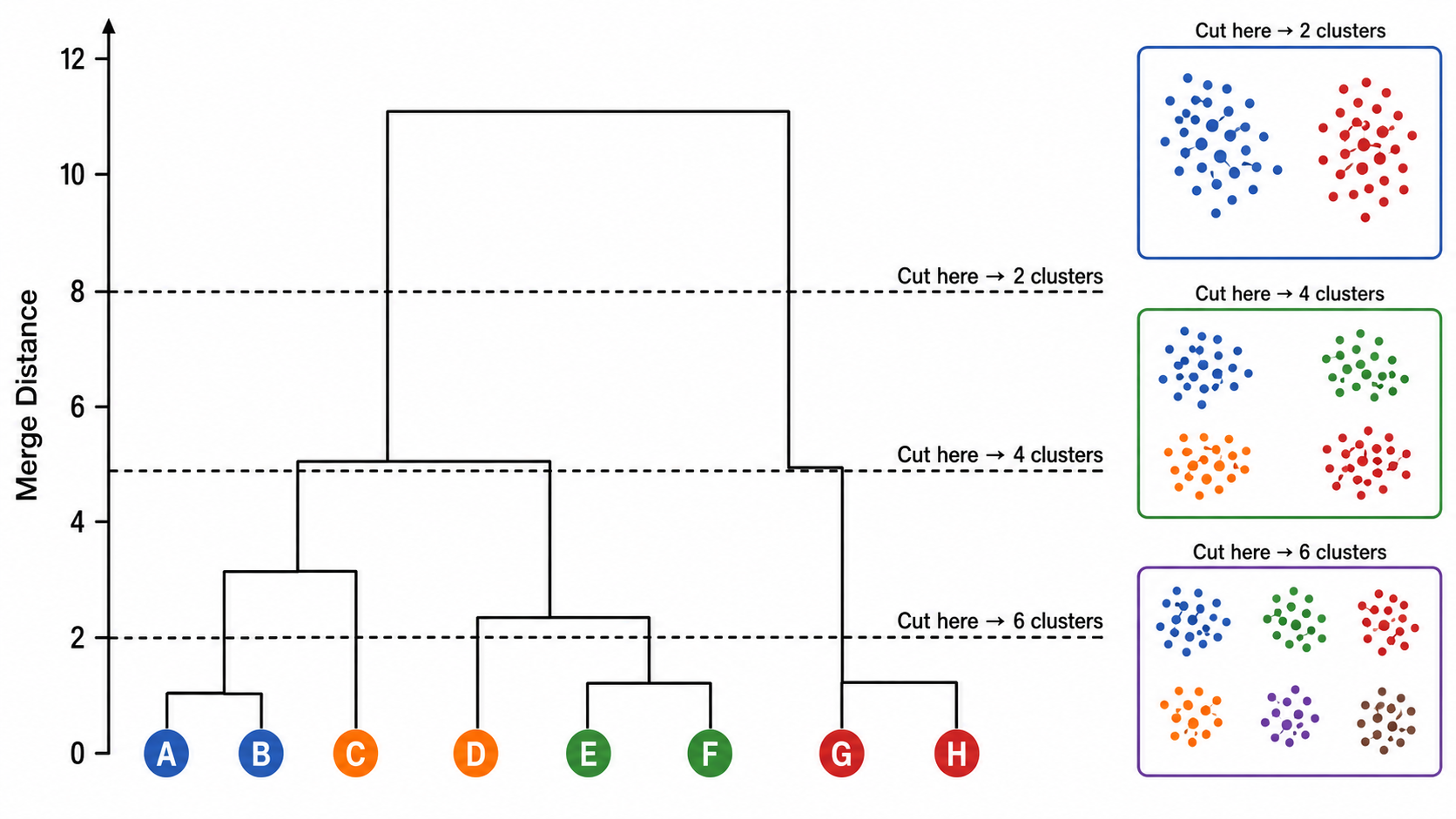
4.3 谱系图(Dendrogram)
谱系图是层次聚类最重要的可视化工具。它是一棵二叉树:
- 横轴:数据点(叶子节点)
- 纵轴:合并/分裂时的距离
- 水平线:连接两个被合并的子簇
通过在不同高度"切一刀",可以得到不同数量的簇。这是层次聚类不需预先指定 K 的关键优势。
五、聚类评估指标
聚类是无监督任务,没有"正确答案"。但我们可以用内部指标(不依赖标签)来衡量聚类的质量。
5.1 轮廓系数(Silhouette Coefficient)
对每个样本
:样本 到同簇其他样本的平均距离(簇内紧致度) :样本 到最近的其他簇所有样本的平均距离(簇间分离度)
轮廓系数为:
接近 :样本被很好聚类( ) 接近 :样本处于两个簇的边界上 接近 :样本可能被分配到错误的簇
整个聚类结果的轮廓系数是所有样本
轮廓系数分析图(Silhouette Analysis) 是选择最佳 K 的常用工具:画出不同 K 值下每个簇的轮廓系数分布和平均值,选平均轮廓系数最高的 K。
5.2 Calinski-Harabasz 指数(方差比准则)
CH 指数定义为簇间离散度与簇内离散度的比值:
其中:
是簇间散布矩阵: 是簇内散布矩阵: 表示矩阵的迹(trace) 是总样本数
CH 指数越高,说明簇间分散、簇内紧凑,聚类效果越好。
5.3 Davies-Bouldin 指数
DB 指数度量的是簇之间的平均相似度(越低越好):
其中
5.4 指标对比
| 指标 | 范围 | 最优方向 | 适用场景 |
|---|---|---|---|
| 轮廓系数 | 越高越好 | 通用的 K 选择 | |
| CH 指数 | 越高越好 | 簇为凸形时效果好 | |
| DB 指数 | 越低越好 | 对任意形状的簇 |
六、聚类算法选择指南
数据有没有明显的球形结构?
├── 是 → K-Means(简单高效,先试)
└── 否 → 数据中有噪声和任意形状的簇?
├── 是 → DBSCAN(密度聚类,自动发现簇数)
└── 否 → 需要了解数据的层次结构?
├── 是 → 层次聚类(谱系图提供丰富信息)
└── 否 → 尝试 GMM(概率软分配,见 ml12)实战建议:先用 DBSCAN 探索数据结构(看看有没有噪声和有趣的形状),再用 K-Means 做快速划分,必要时用层次聚类理解数据的多层次组织关系。
本章总结
| 概念 | 一句话 |
|---|---|
| K-Means | 交替执行分配和更新,最小化簇内平方误差 |
| Lloyd 算法 | 分配+更新的交替迭代,单调降低目标函数 |
| K-Means++ | 用概率采样选择分散的初始质心 |
| DBSCAN | 基于密度连通性发现任意形状的簇,天然抗噪声 |
| 核心点/边界点/噪声点 | DBSCAN 的三种角色分类 |
| DBSCAN 的两个核心参数,用 k-距离图选择 | |
| AGNES | 自底向上层次聚类,每次合并最相似的两个簇 |
| DIANA | 自顶向下层次聚类,每次分裂一个簇 |
| Single Linkage | 最小簇间距离,倾向链式效应 |
| Complete Linkage | 最大簇间距离,倾向紧凑簇 |
| 谱系图(Dendrogram) | 层次聚类的树状可视化,可灵活选择簇数 |
| 轮廓系数 | |
| CH 指数 | 方差比:簇间离散度 / 簇内离散度 |
| DB 指数 | 平均相似度,越低越好 |
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Lloyd, S. (1982). Least squares quantization in PCM. IEEE Transactions on Information Theory, 28(2), 129-137. [doi:10.1109/TIT.1982.1056489]
- Arthur, D. & Vassilvitskii, S. (2007). K-means++: The Advantages of Careful Seeding. SODA 2007. [doi:10.1145/1283383.1283494]
- Ester, M., Kriegel, H. P., Sander, J., & Xu, X. (1996). A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. KDD 1996. [AAAI]
- Rousseeuw, P. J. (1987). Silhouettes: A graphical aid to the interpretation and validation of cluster analysis. Journal of Computational and Applied Mathematics, 20, 53-65. [doi:10.1016/0377-0427(87)90125-7]
- Calinski, T. & Harabasz, J. (1974). A dendrite method for cluster analysis. Communications in Statistics, 3(1), 1-27. [doi:10.1080/03610927408827101]
- Davies, D. L. & Bouldin, D. W. (1979). A Cluster Separation Measure. IEEE Transactions on Pattern Analysis and Machine Intelligence, PAMI-1(2), 224-227. [doi:10.1109/TPAMI.1979.4766909]