s20 深度强化学习:DQN 与 Policy Gradient
从表格到神经网络 —— 当强化学习遇见深度学习
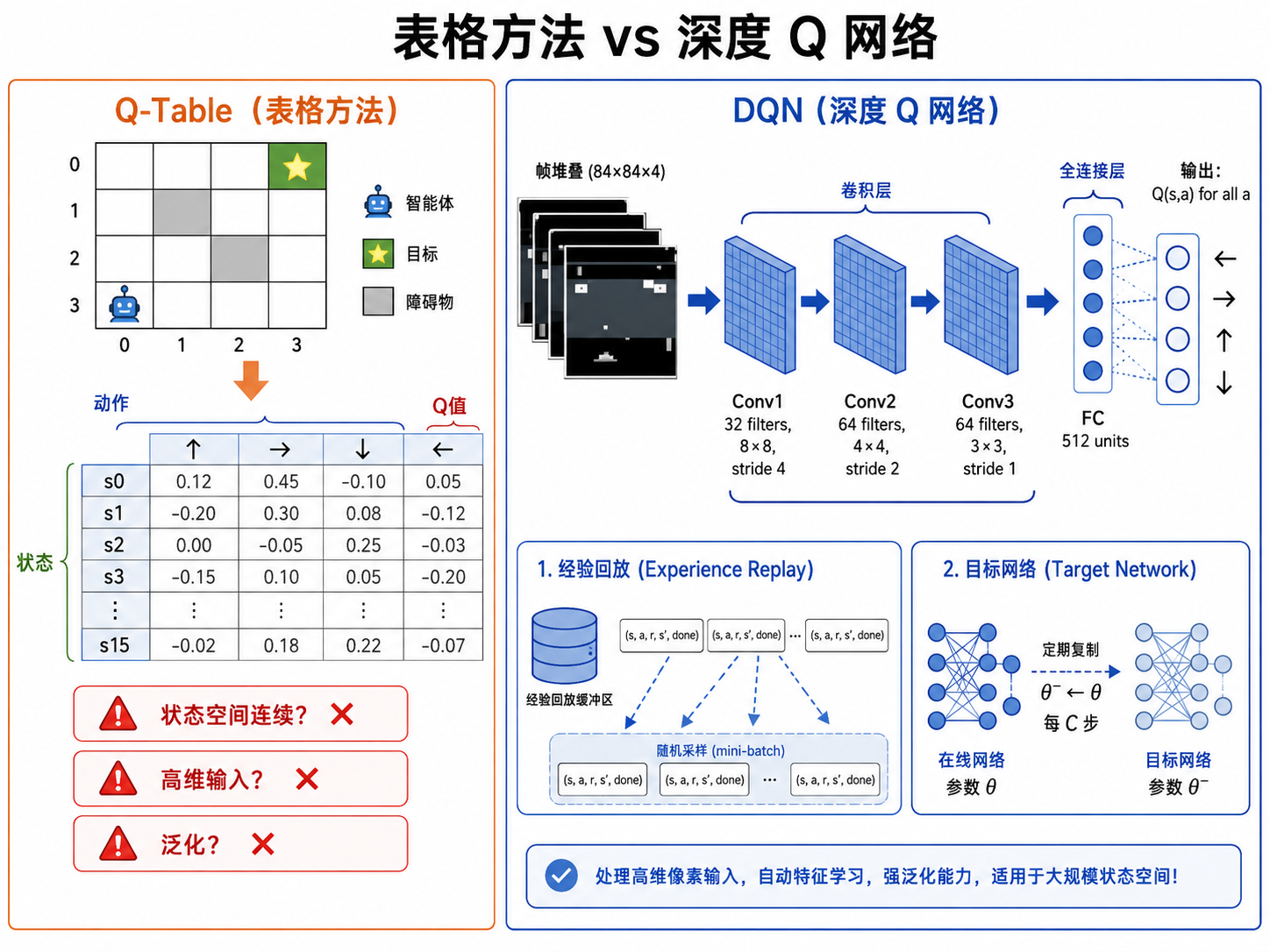
一、Q-Table 的末日:从离散到连续
上一节我们学习了 Q-Learning,它在 GridWorld(
- 自动驾驶:传感器数据(摄像头 + 雷达 + GPS)= 连续高维向量 → 状态空间是
,不可能建表 - Atari 游戏:
像素 = 100800 维,如果用表格存储,宇宙中的所有原子都不够 - 机器人控制:关节角度、速度、力矩都是连续值 → 状态和动作都是连续空间
面对连续/高维状态空间,表格方法的三个核心假设全部崩溃:
- 状态枚举:无法列出所有可能状态(连续空间有无穷多个)
- 独立学习:无法在相似状态之间共享经验(看到一张略微偏移的图片,Q-Table 完全不知如何应对)
- 内存需求:状态数 × 动作数的表格在百万量级就不可行
解决方案:用一个可微的函数逼近器(神经网络)来近似
函数逼近 = 泛化。神经网络学会了"语义相似的状态应该有相似的 Q 值",从而大幅减少所需经验。
二、Deep Q-Network (DQN)
2.1 从 Q-Table 到 Q-Network
Q-Learning 使用
| 方式 | 表示 | 查询 |
|---|---|---|
| Q-Table | Q[state_idx][action_idx] | 直接查表, |
| DQN | 前向传播一次,$O( |
DQN 的输入是状态
这样,一次前向传播就能得到所有动作的 Q 值,效率极高。
2.2 DQN 两大创新
直接将 Q-Learning 的更新规则套用到神经网络上会导致严重的训练不稳定。DeepMind 在 2013 年的奠基性工作中引入了两个关键创新:
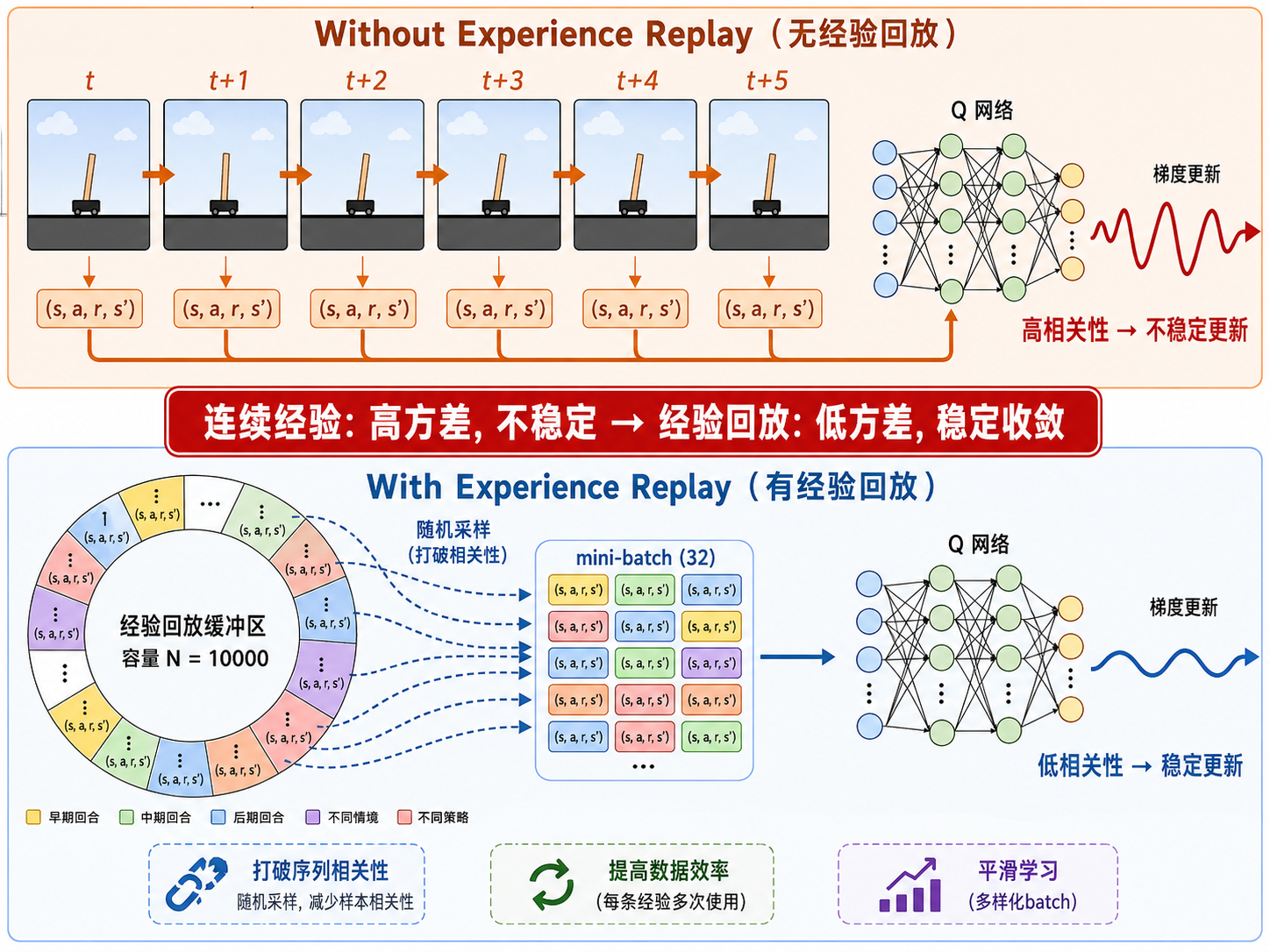
创新 1:经验回放(Experience Replay)
神经网络训练通常假设样本是独立同分布(i.i.d.)的。但强化学习的经验是顺序产生的——连续的
经验回放的解决方案:维护一个重放缓冲区
- 打破相关性:随机采样让每个 batch 中的经验来自不同时间和策略,近似 i.i.d.
- 提高数据效率:每条经验可以被反复使用多次,而不是用过即弃
- 平滑学习:从多样化的经验中学习,减少策略振荡
创新 2:目标网络(Target Network)
Q-Learning 的 TD 目标中包含
DQN 的解决方案:维护两个网络:
- 在线网络(Online Network)
:用于选择动作和计算当前 Q 值,每一步都更新 - 目标网络(Target Network)
:用于计算 TD 目标中的 ,每隔 步才从在线网络复制一次权重( )
2.3 DQN 损失函数
DQN 的损失函数就是一个回归问题——让
其中:
:在线网络的输出(当前预测) :目标网络的输出(稳定目标) - 注意:梯度只通过在线网络反向传播,目标网络被视为常数
2.4 DQN 算法流程
初始化在线网络 Q_θ,目标网络 Q_θ⁻ = Q_θ
初始化经验回放缓冲区 D(容量 N)
重复(每个 episode):
初始化状态 s
重复(每步):
以 ε-贪婪策略选择动作 a(基于 Q_θ)
执行 a,观察 r 和 s'
将 (s, a, r, s') 存入 D
从 D 中随机采样 mini-batch B
计算 TD 目标: y = r + γ·max_{a'} Q_θ⁻(s', a') (如果 s' 是终止态,y = r)
计算损失: L = (1/|B|)·Σ (y - Q_θ(s,a))²
执行梯度下降更新 θ
每隔 C 步: θ⁻ ← θ
s ← s'三、Policy Gradient:直接学习策略
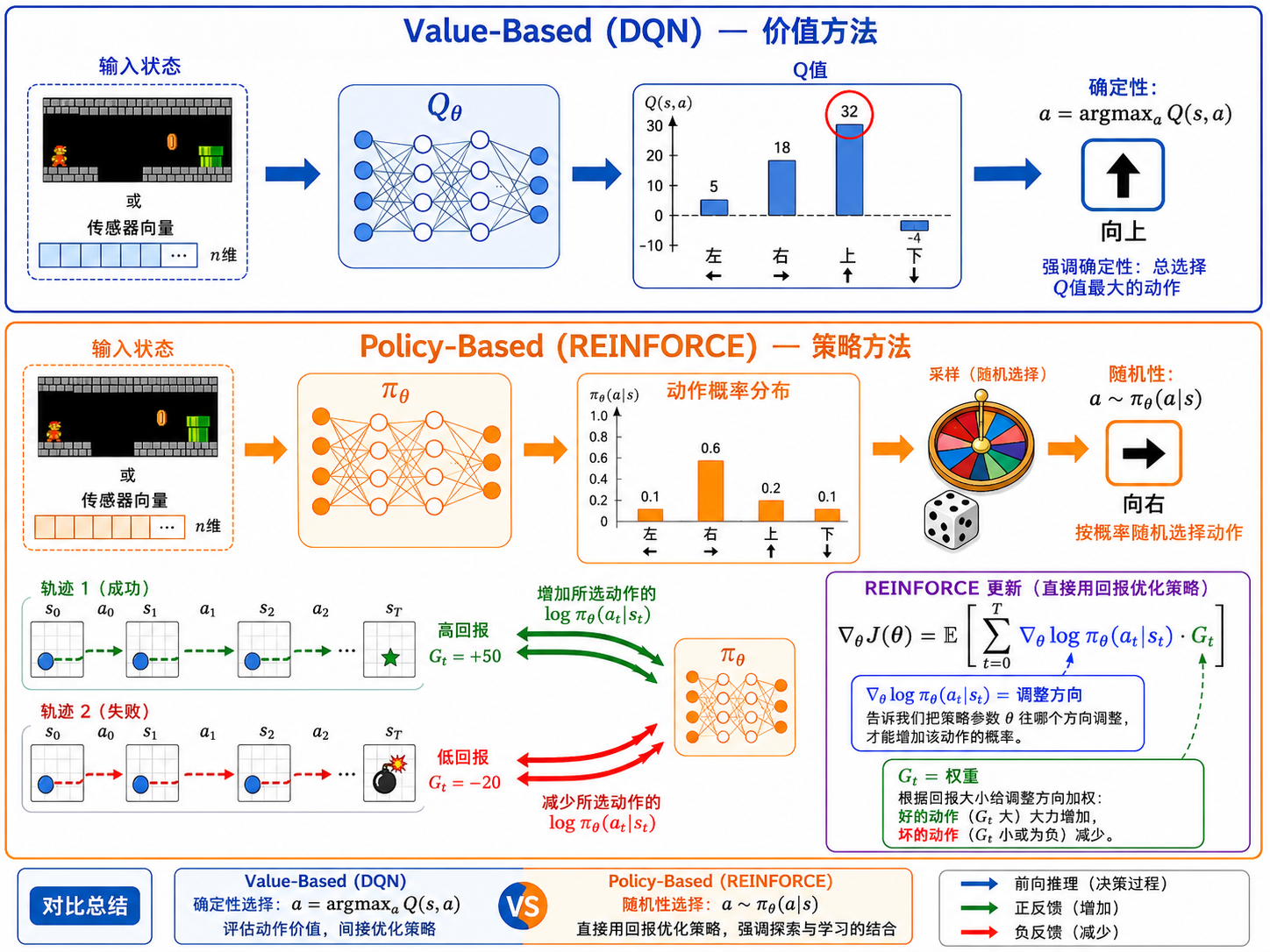
3.1 价值方法的局限性
DQN 属于基于价值的方法——它学习 Q 函数,再由 Q 函数推导出策略(
- 确定性策略:
产生的策略是确定的——在同一个状态下永远选择同一个动作,这在某些场景(如博弈)中是可被对手利用的 - 连续动作困难:当动作空间是连续的(如机器人关节力矩),需要在整个动作空间中取
,这是个优化问题本身 - 策略改进的平滑性:Q 值的微小变化可能导致策略的剧烈变化(
不连续)
基于策略的方法绕过了 Q 值这个中间层,直接参数化并优化策略
3.2 REINFORCE 算法
REINFORCE 是最经典的策略梯度算法。核心思路:
定义目标函数
策略梯度定理告诉我们:
其中
直觉解释:
:告诉我们应该如何调整参数来增加选择动作 的概率 :加权因子——如果 很大(好的动作序列),大力增加概率;如果 很小(坏的动作序列),小幅增加甚至减少概率
REINFORCE 的算法流程:
初始化策略网络 π_θ
重复(每个 episode):
用 π_θ 采样一条完整轨迹 τ = (s_0, a_0, r_0, ..., s_T)
计算每一步的回报 G_t
更新: θ ← θ + α Σ_t ∇_θ log π_θ(a_t|s_t) · G_tREINFORCE 的缺点是高方差——不同轨迹的累计回报可能相差巨大。这引出了 Actor-Critic 方法。
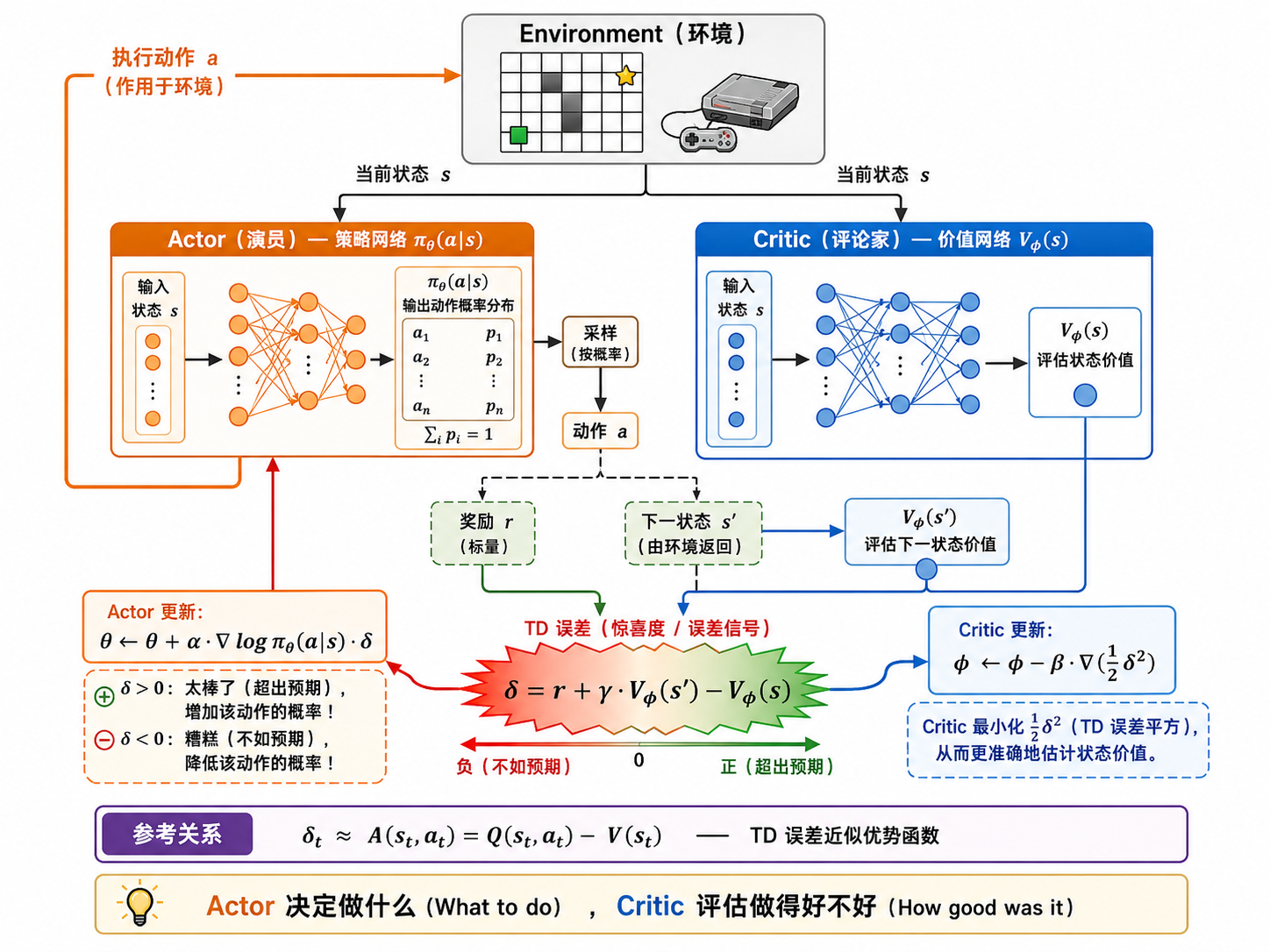
四、Actor-Critic 方法
4.1 为什么需要 Critic?
REINFORCE 用完整的累计回报
解决方案:不要用原始的
Actor-Critic 架构包含两个网络:
- Actor
:策略网络,决定做什么(演员) - Critic
:价值网络,评估刚才做得怎么样(评论家)
4.2 优势函数
我们不直接使用
优势函数衡量的是:"执行动作
在实践中,优势函数的估计使用 TD 误差
Actor 用
4.3 A2C / A3C
- A2C(Advantage Actor-Critic):同步版本,多个 worker 并行采样,收集完所有梯度后一次性更新
- A3C(Asynchronous Advantage Actor-Critic):异步版本,每个 worker 独立采样、计算梯度并更新全局网络,无需等待其他 worker
Actor-Critic 方法结合了两种方法的优点:
- 从策略梯度继承:可以直接输出随机策略、处理连续动作
- 从价值方法继承:利用 bootstrapping 降低方差、提高样本效率
五、三种方法的对比
| 维度 | Value-Based (DQN) | Policy-Based (REINFORCE) | Actor-Critic (A2C) |
|---|---|---|---|
| 学习对象 | Q 函数 | 策略 $\pi_{\theta}(a | s)$ |
| 策略类型 | 确定性( | 随机性(概率分布) | 随机性(概率分布) |
| 动作空间 | 离散 | 离散 + 连续 | 离散 + 连续 |
| 样本效率 | 高(经验回放) | 低(on-policy) | 中等 |
| 方差 | 低(bootstrapping) | 高(Monte Carlo) | 低(advantage) |
| 偏差 | 有偏(bootstrapping) | 无偏(Monte Carlo) | 有偏(bootstrapping) |
| 稳定性 | 需目标网络 | 需 baseline | 需同时训练两个网络 |
| 典型应用 | Atari 游戏 | 简单控制任务 | 复杂连续控制 |
没有一种方法在所有场景下都最优。选择取决于动作空间的类型、样本获取成本、以及是否需要随机策略。
六、从 Atari 到 AlphaGo:深度 RL 的里程碑
理解深度强化学习的完整版图,有必要快速回顾它的关键里程碑:
- 2013: DQN (DeepMind) — 首次用 CNN + Q-Learning 在 Atari 2600 游戏上达到人类水平,发表于 NIPS 2013
- 2015: DQN Nature 版 — 加入目标网络和经验回放,发表于 Nature,标志着"从像素到动作"的端到端学习成为现实
- 2016: AlphaGo (DeepMind) — 结合深度策略网络(SL + RL)和蒙特卡洛树搜索,击败李世石。RL 部分是 Policy Gradient + 自我对弈
- 2017: PPO (OpenAI) — Proximal Policy Optimization,用裁剪目标函数实现稳定更新,成为最广泛使用的 RL 算法之一
- 2019: OpenAI Five / AlphaStar — 在 Dota 2 和星际争霸 2 上达到职业水平,展示 RL 在复杂多智能体场景中的潜力
- 2022: RLHF — 强化学习被用于对齐大语言模型(通过人类反馈),成为 ChatGPT 成功的核心要素
AlphaGo 的 RL 部分本质上就是 Policy Gradient:用自我对弈(self-play)产生数据,用 REINFORCE 风格的梯度优化策略网络。而 RLHF 则是 PPO 在大语言模型上的直接应用。
七、本节小结
| 概念 | 一句话 |
|---|---|
| DQN | 用神经网络 |
| 经验回放 | 从缓冲区随机采样历史经验,打破序列相关性 |
| 目标网络 | 冻结目标 Q 值的计算网络,防止训练振荡 |
| 策略梯度 | 直接优化策略 |
| REINFORCE | 最基础的策略梯度算法,用完整轨迹的累计回报 |
| Actor-Critic | Actor(策略)+ Critic(价值),用优势函数降方差 |
| 优势函数 | |
| A2C | 同步多 worker 的 Actor-Critic,用 |
下一节 s21 RLHF:当强化学习遇见大模型 将展示 PPO 和 DPO 如何被用于对齐大语言模型,这是深度强化学习在当今最重要的应用。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Mnih, V., et al. (2015). Human-level control through deep reinforcement learning. Nature. (DQN) [doi:10.1038/nature14236]
- Williams, R. J. (1992). Simple Statistical Gradient-Following Algorithms for Connectionist Reinforcement Learning. Machine Learning. (REINFORCE) [doi:10.1007/BF00992696]
- Mnih, V., et al. (2016). Asynchronous Methods for Deep Reinforcement Learning. ICML 2016. (A3C) [arXiv:1602.01783]
- Schulman, J., et al. (2017). Proximal Policy Optimization Algorithms. (PPO) [arXiv:1707.06347]
- Silver, D., et al. (2016). Mastering the game of Go with deep neural networks and tree search. Nature. (AlphaGo) [doi:10.1038/nature16961]