s19 强化学习入门:MDP 与 Q-Learning
从零理解强化学习 —— Agent 如何通过"试错"学会最优策略
一、什么是强化学习?
强化学习(Reinforcement Learning, RL)是机器学习的第三大范式。与监督学习和无监督学习不同,强化学习研究的是智能体(Agent)如何在与环境的交互中学习最优行为策略。
用一个比喻来理解:教一个小孩骑自行车。你不会告诉他在每个瞬间应该以多少牛顿的力踩踏、车把应该偏转多少度。你只能说"骑得好"或者"摔倒了再来"。小孩通过反复尝试,自己摸索出保持平衡的策略。这就是强化学习的精神——从交互中学习,从延迟的奖励中学习,从试错中学习。
强化学习的三个关键特征:
- 没有正确答案,只有奖励信号:Agent 不知道每个状态下的"正确动作"是什么,只能根据环境返回的奖励值(标量)来判断行为的好坏。
- 动作有长期后果:一个动作的好坏可能不会立即显现。比如下棋时,弃子(立即损失)可能在十步之后带来胜利(巨大奖励)。
- 探索与利用的权衡:Agent 需要在"做已知好的事"(利用)和"尝试未知的事"(探索)之间找到平衡。
1.1 与监督学习的对比
| 维度 | 监督学习 | 强化学习 |
|---|---|---|
| 训练信号 | 标签(正确答案) | 奖励(标量,可能延迟) |
| 数据来源 | 事先准备好 | 交互中产生 |
| 目标 | 泛化到新样本 | 最大化累积奖励 |
| 反馈时机 | 即时 | 可能延迟 |
| 数据分布 | 静态 | 取决于 Agent 行为(非稳态) |
| 典型应用 | 图像分类、语音识别 | 游戏、机器人、对话系统 |
强化学习中,Agent 的行为会影响它看到的数据——这使数据分布不再是静止的,给优化带来了额外的挑战。
二、强化学习的基本框架
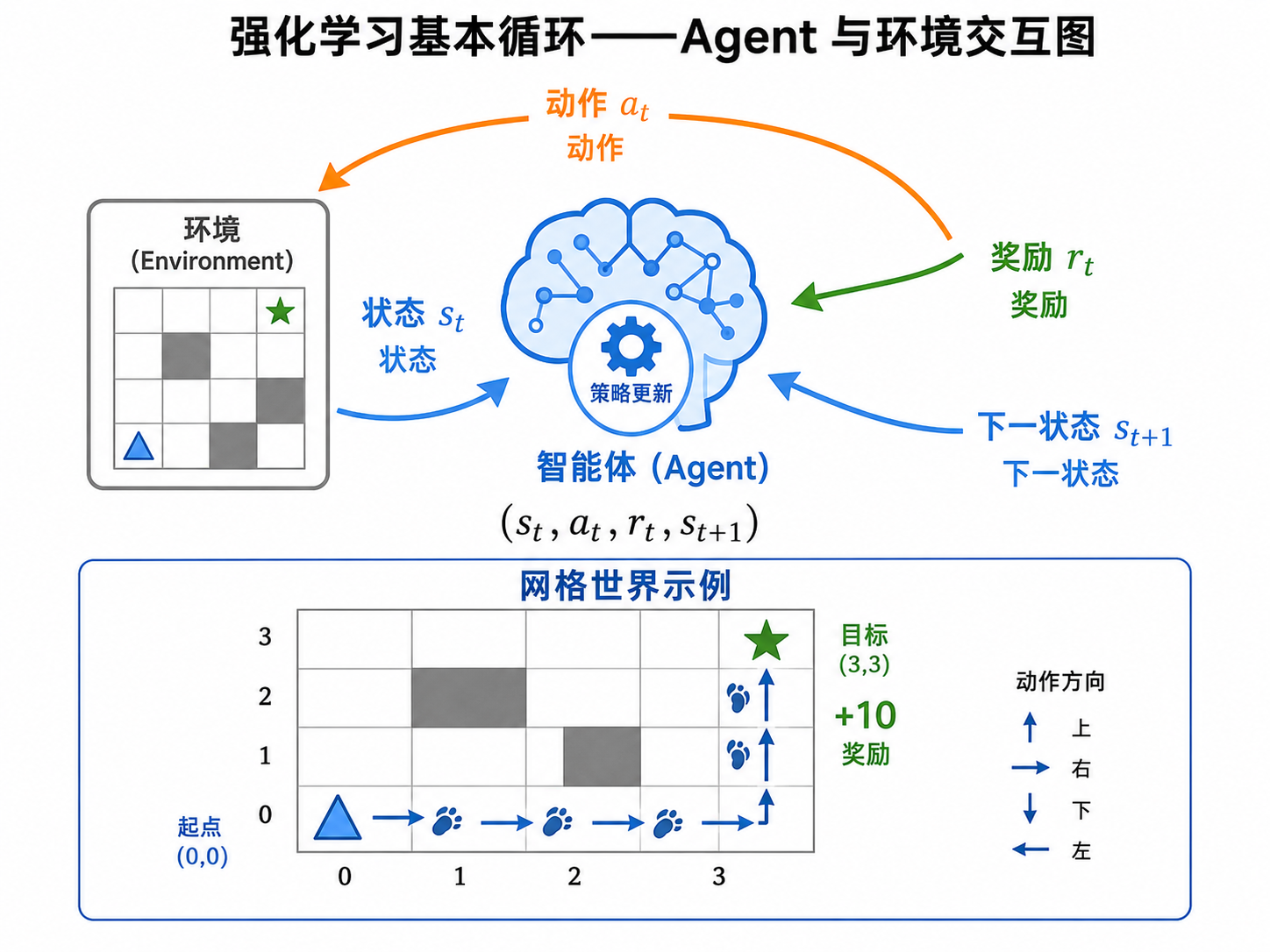
2.1 Agent-Environment 交互循环
强化学习问题被形式化为一个循环交互过程。在每个离散时间步
- Agent 观察到环境的当前状态
- Agent 选择一个动作
- 环境返回一个奖励信号
和下一个状态 - Agent 根据
更新自己的策略 ,回到步骤 1
整个过程产生一条轨迹(Trajectory):
Agent 的目标是最大化累计奖励(Return):
其中
:Agent 只看眼前的奖励(myopic,鼠目寸光) :Agent 同等看重所有未来奖励(farsighted,远见卓识) - 通常设
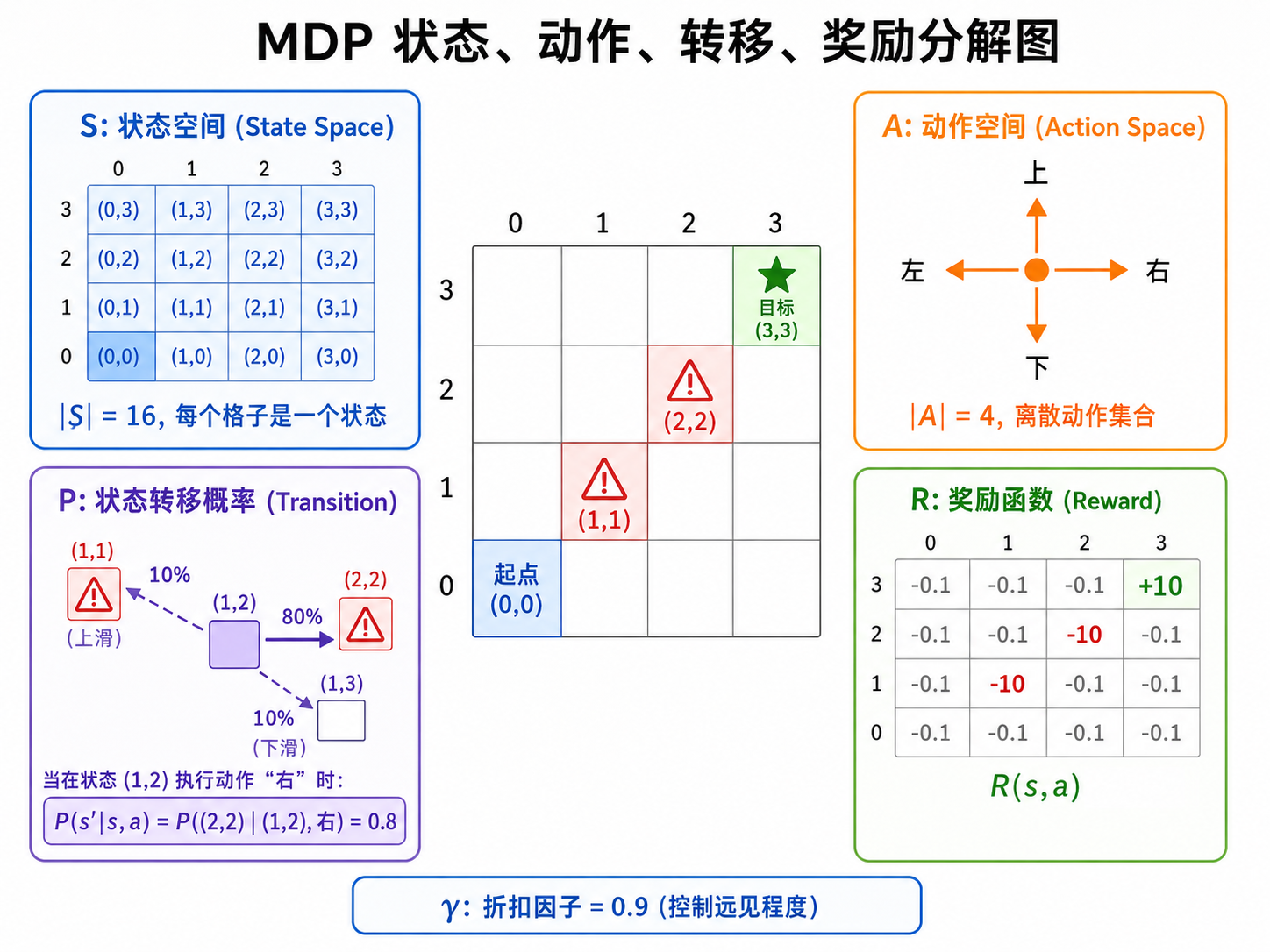
2.2 马尔可夫决策过程(MDP)
强化学习的数学基础是马尔可夫决策过程(Markov Decision Process)。一个 MDP 由五元组定义:
:状态空间 — 所有可能状态的集合。可以是离散的(如棋盘格)或连续的(如机器人关节角度) :动作空间 — 所有可能动作的集合。离散动作(上下左右)或连续动作(力矩值) :状态转移概率 — 在状态 执行动作 后,转移到状态 的概率。马尔可夫性质:下一步只取决于当前状态和动作,与历史无关 :奖励函数 — 在状态 执行动作 后获得的即时奖励 :折扣因子 — 对未来奖励的折扣系数
马尔可夫性质: "The future is independent of the past given the present." 知道当前状态就足够了,不需要记住之前发生了什么。这个假设极大地简化了问题,虽然在实际中并不总是成立,但实践证明它足够好用。
三、策略与价值函数
3.1 策略(Policy)
策略
- 确定性策略:
—— 给定状态,输出唯一动作 - 随机性策略:
—— 给定状态,输出动作的概率分布
策略是强化学习的核心——我们最终想要的就是一个最优策略
3.2 价值函数(Value Function)
价值函数衡量的是"某个状态(或状态-动作对)有多好",其中"好"定义为未来累计奖励的期望。
状态价值函数
动作价值函数
直观理解:状态的价值 = 所有可能动作的价值按策略概率加权求和。
3.3 贝尔曼方程(Bellman Equation)
贝尔曼方程是强化学习中最重要的递归关系。它把当前状态(或状态-动作对)的价值,分解为即时奖励加上下一状态(打折后的)价值:
对于
这个方程的直觉是:最优的
四、Q-Learning:从表格开始
4.1 为什么是 Q-Learning?
Q-Learning 是 Watkins 在 1989 年提出的经典算法。它有三个核心特性:
- Model-Free(无模型):不需要知道环境的状态转移概率
,只需要从交互中采样 - Off-Policy(异策略):学习最优策略
,但可以用任意行为策略(如 -greedy)来收集经验 - Temporal Difference(时序差分):结合了蒙特卡洛(采样完整轨迹)和动态规划(自举/bootstrapping)的优点
4.2 Q-Table
当状态空间和动作空间都是离散且较小时,我们可以用一个查找表来存储每个状态-动作对的
Q[s][a] = 该状态-动作对的估计价值例如,一个
4.3 Q-Learning 更新规则
核心更新公式(即TD 更新):
逐项解释:
(学习率):控制每次更新有多"相信"新信息( 完全替换, 不学习) :TD 目标——我们"认为" 应该值多少 :TD 误差——当前估计离目标的差距 - 乘以
后加到原来值上:朝着目标走一小步
这里的
体现了 off-policy 特性——我们用最优策略来选择下一个动作,但实际执行的动作由行为策略决定。
4.4 Q-Learning 算法流程
初始化 Q(s, a) = 0,对所有 s ∈ S, a ∈ A
重复(每个 episode):
初始化状态 s
重复(每步):
以 ε-贪婪策略选择 a(对当前 Q 值的估计)
执行 a,观察到奖励 r 和下一状态 s'
Q(s, a) ← Q(s, a) + α [r + γ·max_{a'} Q(s', a') - Q(s, a)]
s ← s'
直到 s 为终止状态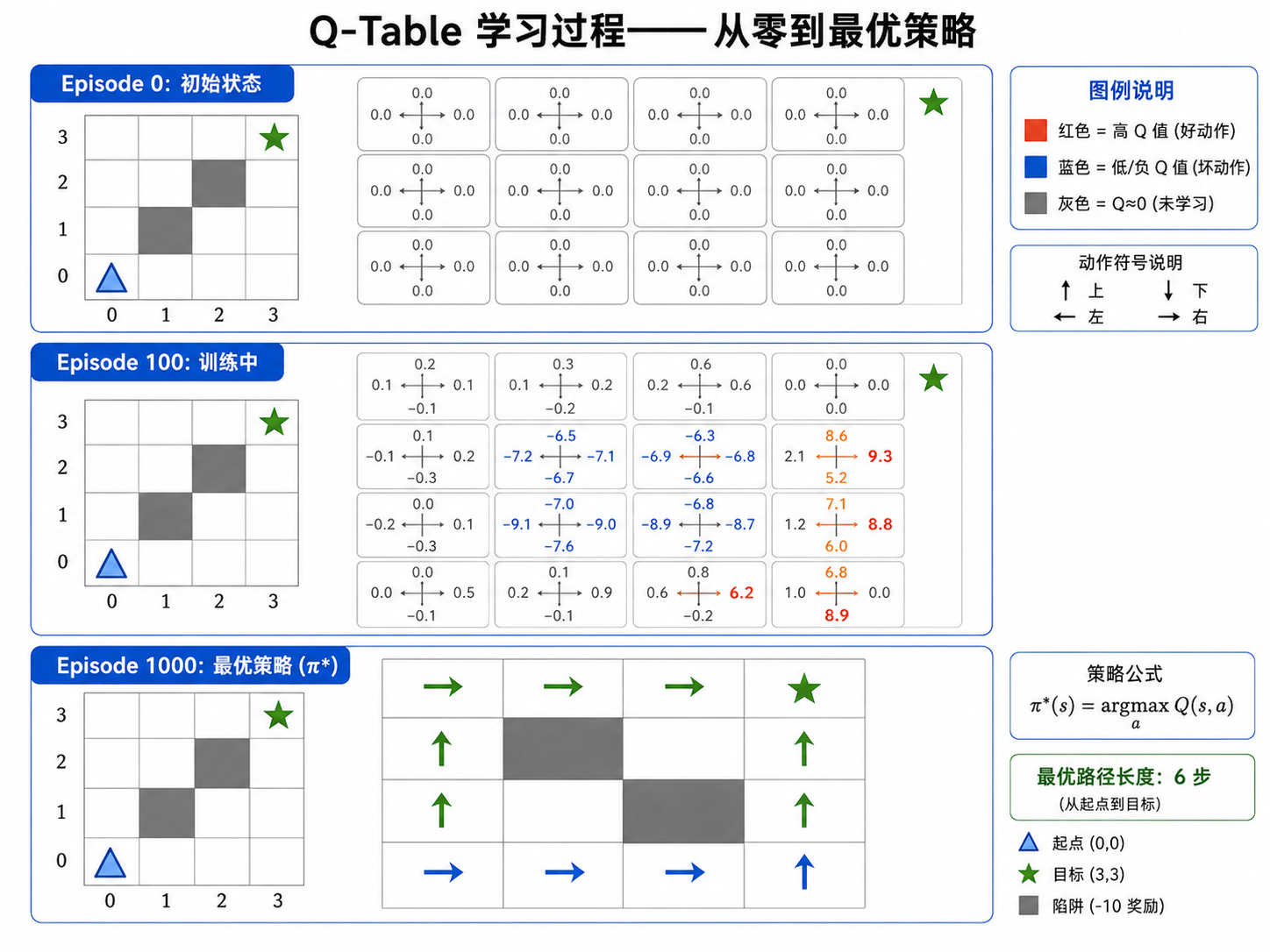
五、探索 vs 利用:ε-贪婪策略
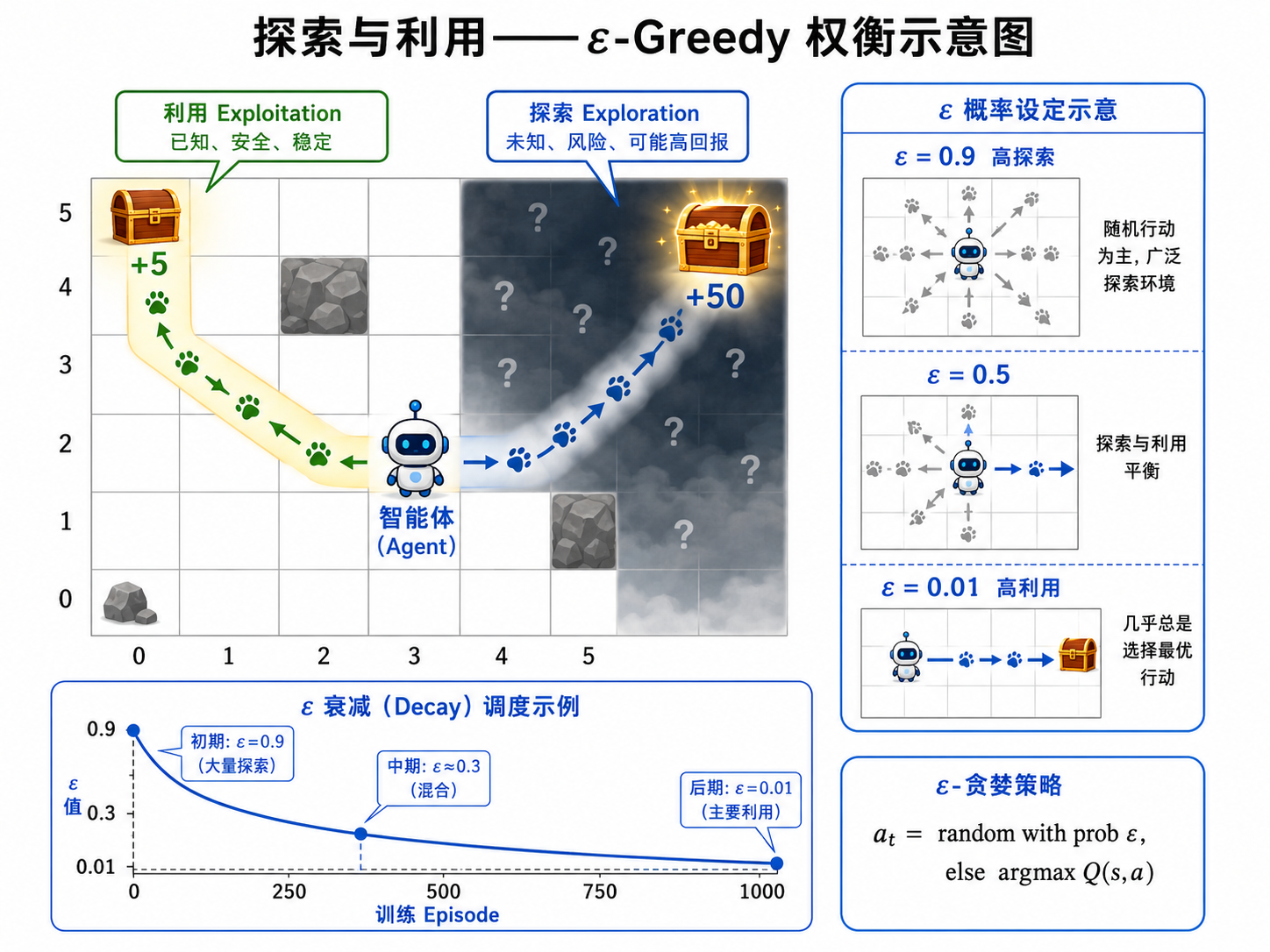
强化学习面临一个根本困境:探索(Exploration) 与 利用(Exploitation) 的权衡。
- 利用:选择当前
值最高的动作——最大化短期奖励 - 探索:随机选择一个动作——收集更多信息,可能找到更好的长期策略
如果只利用不探索,Agent 可能永远发现不了更好的策略。如果只探索不利用,Agent 永远不会享受它学到的东西。
ε-贪婪策略(ε-Greedy)
这是最简单也最常用的探索策略:
实践中,通常让
- 训练初期:
很大(如 0.9),Agent 大量探索 - 训练后期:
很小(如 0.01),Agent 主要利用学到的知识
六、网格世界实例:从数字建立直觉
让我们通过一个具体的
6.1 环境设置
网格世界 (4×4):
+-----+-----+-----+-----+
| S(0,0)| | | | ← 起点在 (0,0)
+-----+-----+-----+-----+
| | X | | | ← (1,1) 是陷阱 (-10 奖励)
+-----+-----+-----+-----+
| | | X | | ← (2,2) 是陷阱 (-10 奖励)
+-----+-----+-----+-----+
| | | | G | ← (3,3) 是目标 (+10 奖励)
+-----+-----+-----+-----+
每步奖励: -0.1 (鼓励走最短路径)
折扣因子 γ = 0.9
学习率 α = 0.16.2 执行一次更新
假设 Agent 当前在
- 当前状态
,动作 - 执行后:Agent 移动到
,奖励 (步数惩罚) - 假设当前
, (上下左右)
计算更新:
Agent 学到了一点点——向右走比之前认为的好了一点点(因为
6.3 多步传播
Agent 在第 100 个 Episode 中到达了目标
, , , - 假设
(终止状态,没有下一步动作)
在第 200 个 Episode 中,这个价值会通过贝尔曼备份传播回更早的状态:
这就是 Q-Learning 之美:奖励信号像涟漪一样,从目标逐步扩散回整个状态空间。
七、Q-Learning 的局限性
虽然 Q-Learning 优雅且有效,但它有几个根本限制:
- 状态空间爆炸:当状态连续(如机器人位置)或高维(如图像像素)时,Q-Table 不可行
- 离散动作:Q-Learning 天然处理离散动作,连续动作需要额外技巧
- 泛化困难:表格方法无法在状态之间泛化——即使两个状态很相似,也必须分别学习它们的 Q 值
- 收敛速度:在大状态空间中,需要海量交互才能填满 Q-Table
这些限制直接引出了下一节的主题——深度强化学习:用神经网络代替 Q-Table,实现从状态到 Q 值的泛化映射。
八、本节小结
| 概念 | 一句话 |
|---|---|
| 强化学习 | Agent 通过与环境交互、接收延迟奖励来学习最优策略 |
| MDP | 用 (S, A, P, R, γ) 五元组建模决策问题 |
| 策略 | 定义在每个状态下选择什么动作 |
| 价值函数 | 从状态 |
| Q 函数 | 在状态 |
| 贝尔曼方程 | 将价值递归地表达为即时奖励 + 未来折扣价值 |
| Q-Learning | 无模型、异策略的 TD 学习算法,用表格存储 Q 值 |
| TD 更新 | Q(s,a) += α[r + γ·max Q(s',a') - Q(s,a)] |
| ε-贪婪 | 以 ε 概率探索,以 1-ε 概率利用 |
| 探索 vs 利用 | RL 的核心困境:收集新信息 vs 利用已知信息 |
下一节 s20 深度强化学习:DQN 与 Policy Gradient 将展示如何用神经网络突破 Q-Table 的维度限制,处理连续状态空间和大规模问题。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Watkins, C. J. C. H. & Dayan, P. (1992). Q-Learning. Machine Learning. [doi:10.1007/BF00992698]
- Sutton, R. S. & Barto, A. G. (2018). Reinforcement Learning: An Introduction. 2nd Edition. MIT Press. [link]
- Bellman, R. (1957). A Markovian Decision Process. Journal of Mathematics and Mechanics. (MDP 理论基础)