多模态模型:从 CLIP 到视觉语言模型
1. 什么是多模态?
人类感知世界的方式天生就是多模态的——我们同时用眼睛看、用耳朵听、用触觉感受、用语言交流。一个孩子在认识「狗」这个概念时,不是只看文字定义,而是看到狗的图片、听到狗的叫声、亲手抚摸狗的毛皮,这些不同感官通道的信息在大脑中融合,形成了对「狗」的丰富理解。
多模态学习(Multimodal Learning) 的目标与此类似:让机器能够同时理解和推理来自多种模态的信息——文本、图像、音频、视频、传感器数据等。传统深度学习模型往往是单模态的:计算机视觉模型只处理图像,自然语言处理模型只处理文本,语音模型只处理音频。多模态模型则打破了这些边界。
为什么多模态很重要?
- 互补性:不同模态提供互补信息。一段烹饪视频中,视觉信息告诉你厨师做了什么动作,音频信息告诉你火候大小的声音变化,文本(字幕/标题)告诉你菜名和步骤。
- 鲁棒性:多模态系统对单一模态的噪声或缺失更具鲁棒性。如果音频嘈杂听不清,还可以看画面和字幕。
- 自然交互:人类与AI的自然交互方式本应是多模态的——我们可以指着一张图问「这是什么?」,也可以用语音描述想生成的图像。
- 更深的语义理解:真正的「理解」需要在多种模态间建立联系。知道「苹果」这个词,并且能识别苹果的图片,还能理解「苹果」在不同语境下的含义(水果 vs 公司),这才是更深层的语义理解。
2. 核心挑战:不同模态的结构鸿沟
多模态学习的核心挑战在于:不同模态的数据具有根本不同的结构和统计特性。
2.1 模态的结构差异
文本是离散的、序列化的。一段文本由有限词汇表中的 token 组成,每个 token 是离散符号,文本长度可变,遵循语法规则。文本在计算中被表示为 token ID 序列。
图像是连续的、空间排列的。一张图像由像素网格组成,每个像素有 RGB 三个连续值。图像的「语义」不依赖于固定的词汇表,而是分布在像素的空间排列中。图像在计算中被表示为张量
。 音频是一维时间序列,采样率高(通常 16kHz-48kHz),变化快。音频在计算中被表示为波形或频谱图。
视频是时空数据,可以看作图像序列 + 音频流。维度更高,计算量巨大。
这些差异使得用一个统一模型同时处理所有模态变得极其困难。早期的做法是为每种模态设计专门的编码器,然后在高层语义空间中做融合。而现代的趋势是:将所有模态映射到一个共享的表示空间,在这个空间中不同模态但语义相似的内容具有相近的向量表示。
2.2 共享语义空间
多模态学习的核心思想可以用一个简单公式表达:
即,一张狗的图片的向量表示,应该和一段描述「一只狗」的文本的向量表示,在同一个向量空间中非常接近。如果做到了这一点,我们就可以在这个共享空间中实现跨模态的检索、推理和生成。
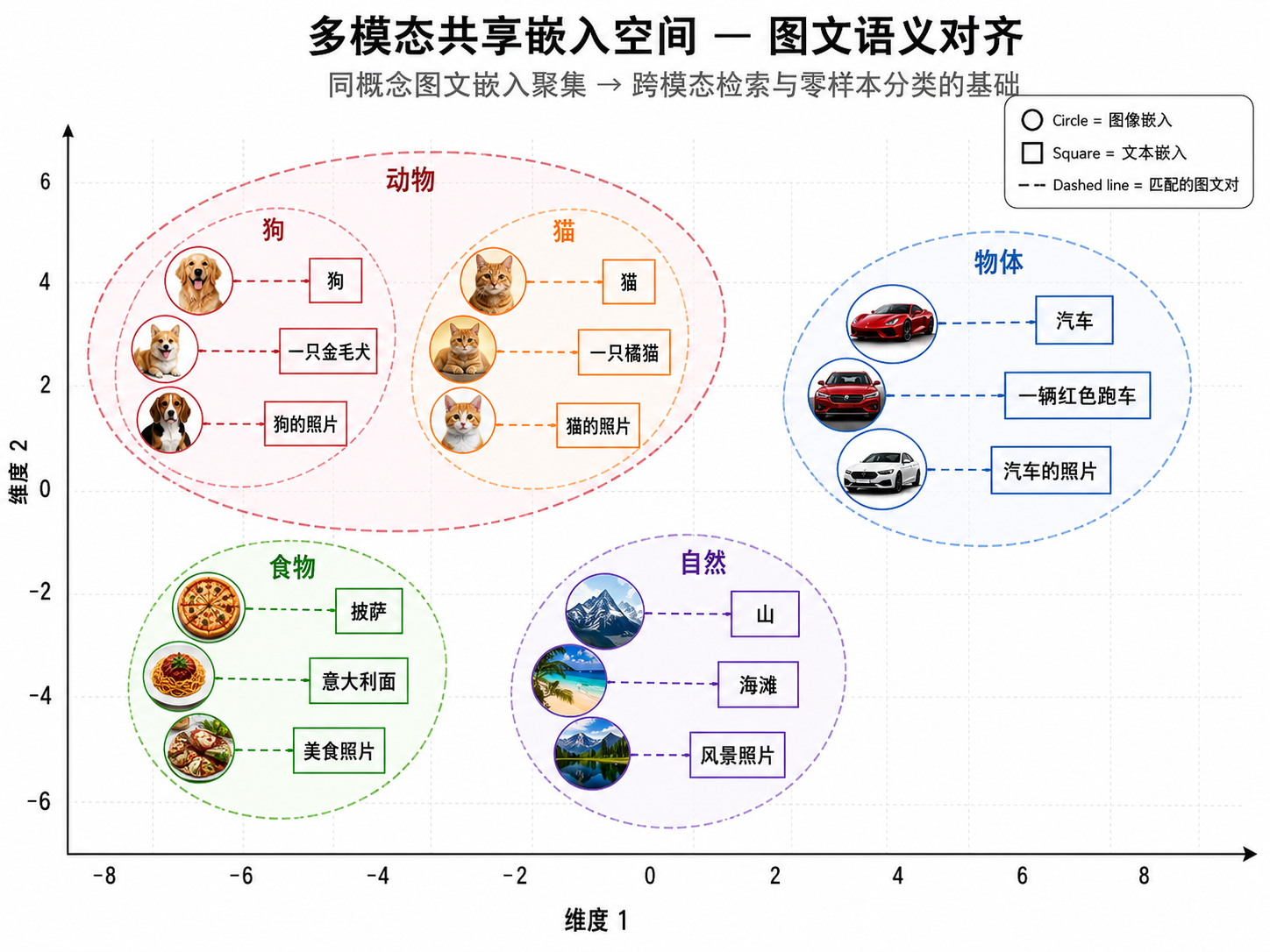
图解说明:图 22-04 展示了图像嵌入(圆圈)和文本嵌入(方块)在同一个 2D 投影空间中的分布。同类概念的图文表示聚集在一起——「狗」的图像和文字在一个簇中,「猫」的图像和文字在另一个簇中,动物类概念彼此靠近,交通工具类概念彼此靠近。
3. CLIP:对比语言-图像预训练
CLIP(Contrastive Language-Image Pre-training) 是 OpenAI 于 2021 年(Radford et al.)提出的里程碑式工作,它建立了一种简单而强大的跨模态连接方式。
3.1 核心思想
CLIP 的核心思想极其优雅:用自然语言作为图像的监督信号。传统图像分类需要人工标注每个类别的标签(如「猫」、「狗」、「车」),而 CLIP 使用的是互联网上天然存在的图文配对数据——网页上的图片和其周围的文字描述。
CLIP 在 4 亿对图文数据上进行训练,学习将图像和文本映射到同一个向量空间,使得匹配的图文对在这个空间中靠近。
3.2 模型架构
CLIP 由两个独立的编码器组成:
图像编码器(Image Encoder):可以使用 Vision Transformer (ViT) 或 ResNet。输入一张图像,输出一个归一化的向量
- ViT 变体:将图像分割为
的 patch,每个 patch 作为 Transformer 的一个 token,输出取 [CLS] token 的表示或对所有 patch token 做池化。 - ResNet 变体:在标准 ResNet 基础上做了修改(如使用 attention pooling 替代全局平均池化)。
文本编码器(Text Encoder):使用一个标准的 Transformer(GPT-2 风格的 decoder-only 架构)。输入一段文本(用字节对编码 tokenize),输出取最后一个 token([EOS])对应的表示,投影到相同维度
两个编码器输出的向量具有相同的维度(例如 ViT-L/14 中
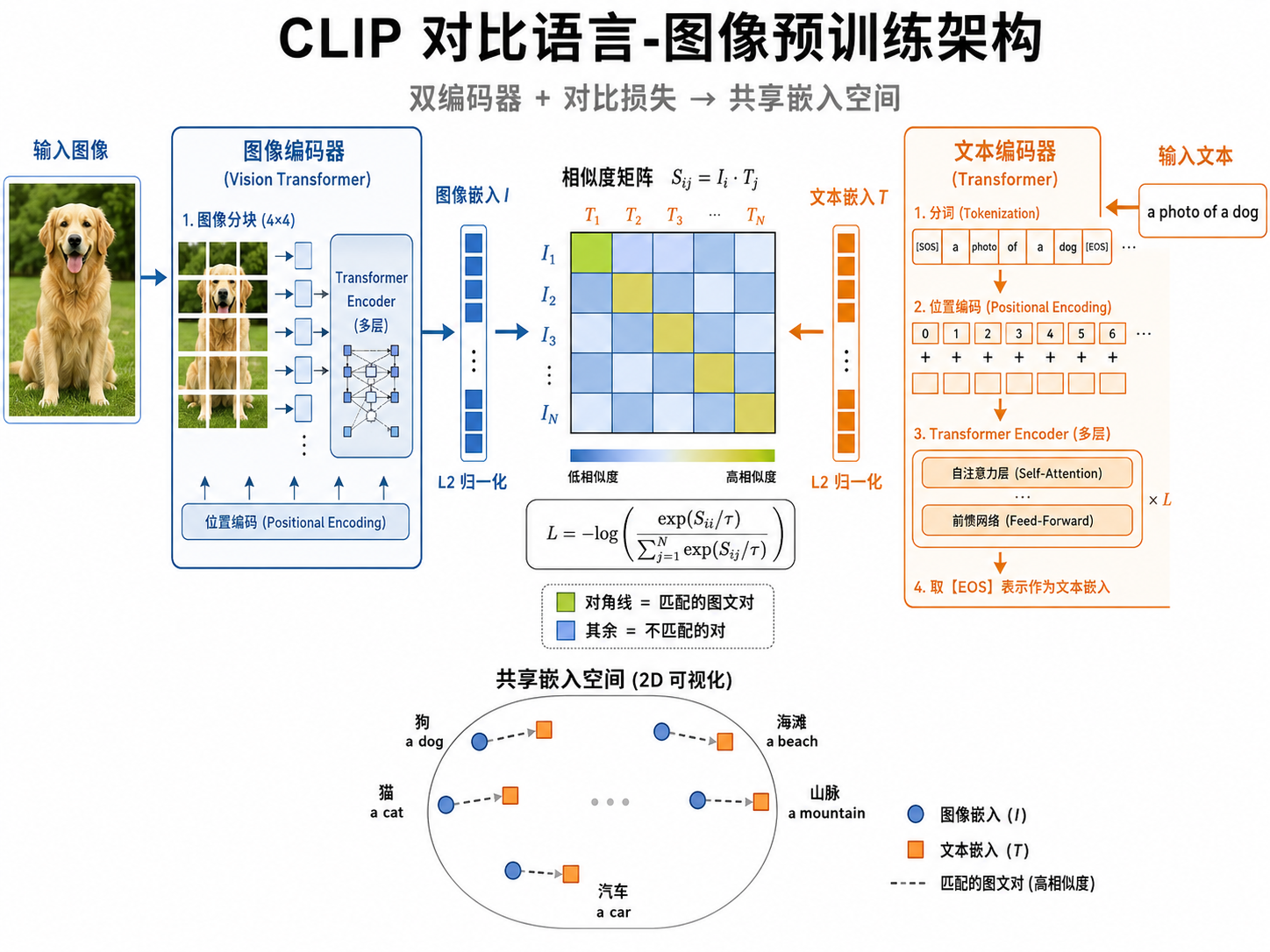
图解说明:图 22-01 展示了 CLIP 的双编码器架构——左侧为图像编码器(ViT)处理狗的照片输出图像嵌入
,右侧为文本编码器(Transformer)处理文字「一只狗的照片」输出文本嵌入 ,中间通过对比损失将匹配的图文对拉近、不匹配的推远。
3.3 对比学习损失
CLIP 的训练目标是对比学习(Contrastive Learning)。核心思想是:在一个 batch 中,匹配的(图像,文本)对视为正样本,不匹配的视为负样本。
具体来说,给定一个 batch 的
由于向量已经 L2 归一化,余弦相似度等价于向量内积:
然后使用 InfoNCE 损失(Information Noise Contrastive Estimation)。这实际上是一个多类 softmax 交叉熵损失,双向计算:
对于图像方向(给定图像,找出匹配的文本):
对于文本方向(给定文本,找出匹配的图像):
最终损失为两者的平均:
其中
直观理解:
- 对于第
张图像,正确的匹配文本是第 个,其余 个文本都是「负样本」。损失函数鼓励 大(正样本相似度高), 小(负样本相似度低)。 - 同样地,对于第
段文本,正确的匹配图像是第 个。这种对称的对比学习是 CLIP 的重要设计。
3.4 零样本分类
CLIP 训练完成后,最令人惊叹的能力是零样本分类(Zero-shot Classification)——可以在从未见过特定类别的情况下对图像进行分类。
零样本分类的流程:
- 将每个类别名称转化为自然语言提示模板(prompt template),例如
"a photo of a {class}"、"a picture of a {class}"。 - 将所有类别的提示模板送入文本编码器,得到每个类别的文本嵌入
。 - 将待分类的图像送入图像编码器,得到图像嵌入
。 - 计算图像嵌入与每个类别文本嵌入的余弦相似度。
- 相似度最高的类别即为分类结果:
。
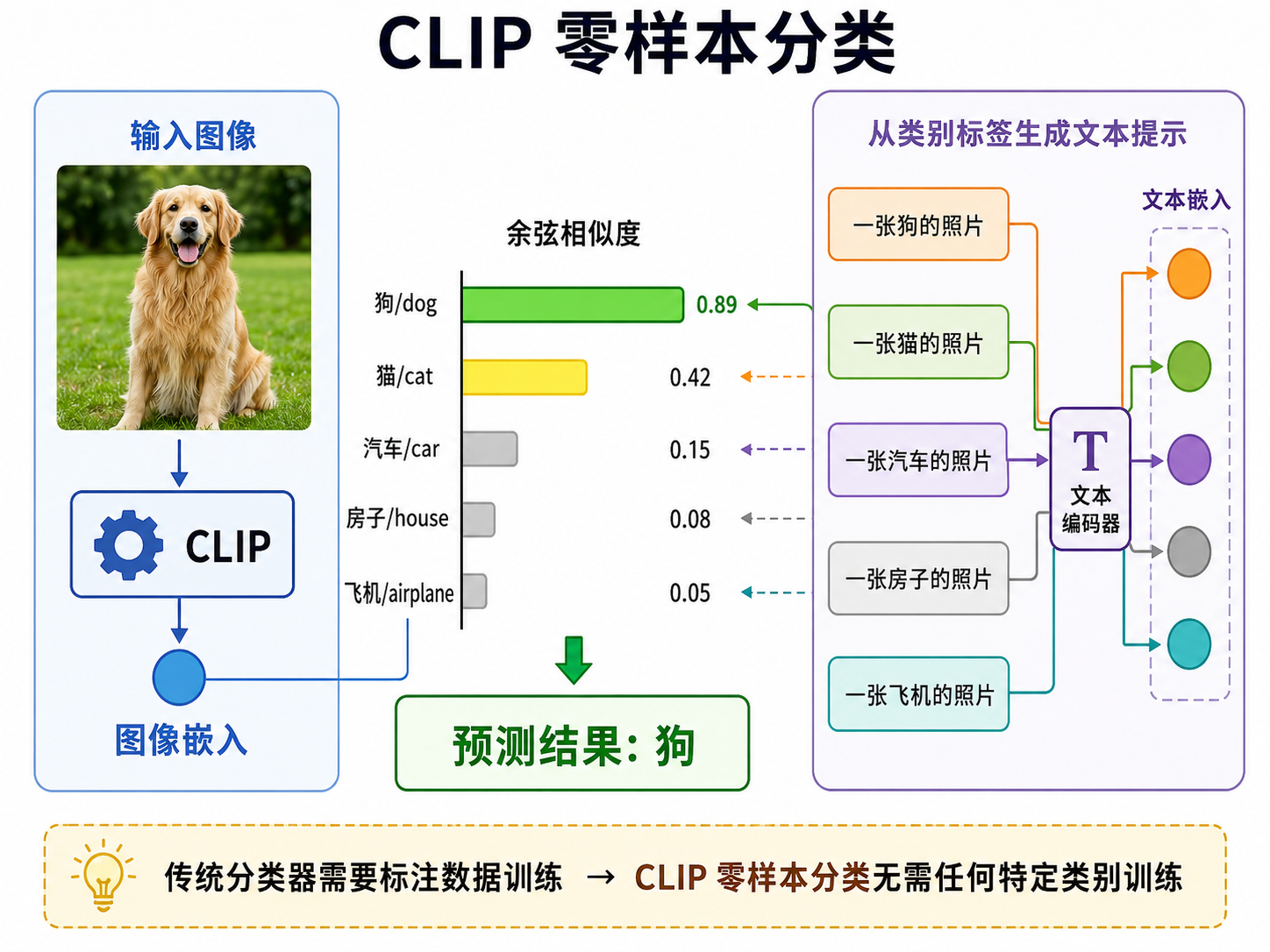
图解说明:图 22-02 展示了 CLIP 零样本分类的过程——输入一张金毛犬的图片,文本提示包括「一张狗的照片」「一张猫的照片」「一张汽车的照片」等,CLIP 计算图像与每个文本提示的余弦相似度,用柱状图展示分数,最高的「狗」被选为预测结果。
这与传统分类器的本质区别在于:传统分类器需要事先定义好固定数量的类别,用大量标注数据训练,而 CLIP 可以动态适应任意新的类别——只需修改文本提示即可。CLIP 在 ImageNet 上的零样本准确率达到了 76.2%,与全监督的 ResNet-50 相当,而后者需要 128 万张标注图像来训练。
4. CLIP 的几何解释:共享嵌入空间
CLIP 的精髓在于构建了一个共享的表示空间,在这个空间中:
- 语义相似的图像和文本具有相近的向量
- 不同模态但相同语义的向量被对齐到同一点附近
- 空间的几何结构反映了语义的层级关系
可以用下面的方式来理解:
更神奇的是,这个空间还具有向量算术的性质。类似于 Word2Vec 中「国王 - 男人 + 女人 = 王后」,CLIP 的嵌入空间也在一定程度上支持跨模态的语义运算。例如,如果我们有一个穿着特定风格衣服的人的照片嵌入,加上「转换为素描风格」的文本方向,理论上可以得到靠近素描风格图片的向量。
这种共享语义空间的存在,是多模态理解的基础。一旦图像和语言被映射到了同一个空间,我们就可以在向量空间中做:
- 图文检索:给定图片找最匹配的文字描述,或给定文字找最匹配的图片。
- 零样本分类:比较图像向量和各类别文本向量的相似度。
- 跨模态推理:在嵌入空间中进行运算,实现更复杂的跨模态任务。
5. 生成式视觉语言模型
CLIP 解决了图文对齐问题,但它是一个判别式模型——只能判断图文是否匹配,不能根据文本生成图像,也不能根据图像生成文本描述。生成式视觉语言模型填补了这一空白。
5.1 DALL-E:文本到图像生成
OpenAI 的 DALL-E 系列(2021-2023)实现了从文本描述生成图像的能力。
- DALL-E 1:使用 VQ-VAE 将图像离散化为 token,然后用类似 GPT 的自回归 Transformer 建模文本 token 和图像 token 的联合分布。本质上,它把图像生成变成了一个「语言建模」问题——给定文本,预测下一个图像 token。
- DALL-E 2:采用两阶段架构。首先用 CLIP 将文本映射到嵌入空间,然后用扩散模型(Diffusion Model)从该嵌入生成图像。CLIP 文本嵌入提供了语义条件,扩散模型负责生成符合该语义的像素。
- DALL-E 3:进一步提升了文本理解和遵循能力,能更准确地反映复杂提示中的细节。
5.2 LLaVA:视觉指令跟随
LLaVA(Large Language and Vision Assistant) 代表了另一个方向:不是文本生成图像,而是让 LLM「看懂」图像,实现视觉指令跟随——用户可以上传一张图片并就此提问,模型用自然语言回答。
LLaVA 的架构极其简洁,由三个组件构成:
组件 1:视觉编码器(Vision Encoder) 使用预训练的 CLIP ViT-L/14。输入图像
组件 2:投影层(Projection Layer) 一个简单的线性层或轻量 MLP,将视觉特征
其中
组件 3:大语言模型(LLM) 使用预训练的 LLM(如 Vicuna、Llama 2、Llama 3)。投影后的视觉 token
其中
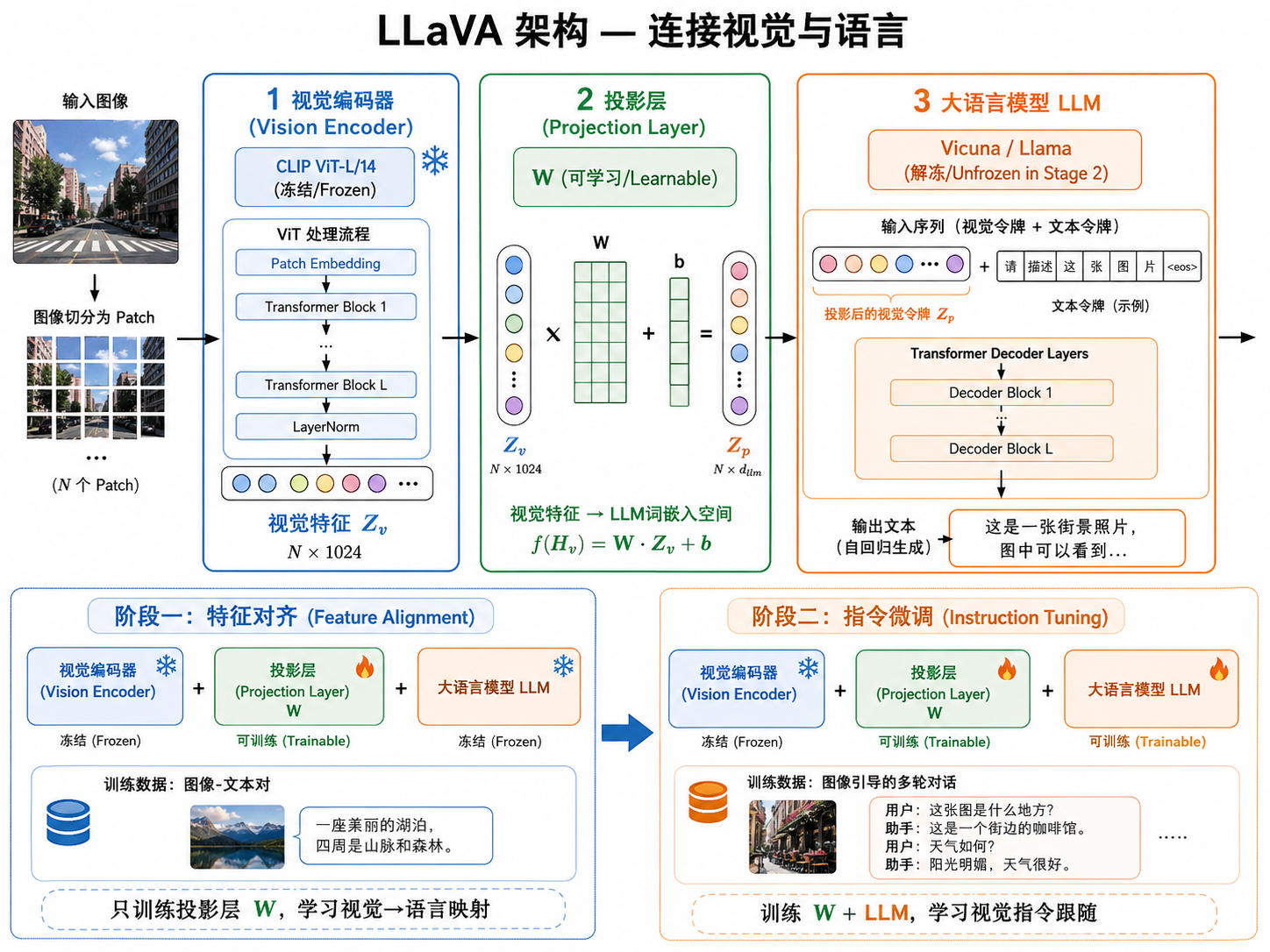
图解说明:图 22-03 展示了 LLaVA 的三组件架构——视觉编码器(CLIP ViT-L/14)处理图像输出 patch token,投影层(MLP/线性层)将视觉特征映射到 LLM 的词嵌入空间,LLM(Vicuna/Llama)接收投影后的视觉 token 和文本 token 并生成回答,下方展示两阶段训练流程。
5.3 LLaVA 的两阶段训练
第一阶段:特征对齐(Feature Alignment)
- 只训练投影层
,冻结视觉编码器和 LLM。 - 使用简单的图文描述数据(如 CC3M 的子集),让投影层学会将视觉特征映射到 LLM 能理解的语言空间。
- 这一阶段的本质是「教 LLM 认识视觉 token」——让它理解投影后的向量与哪些词嵌入相对应。
第二阶段:指令微调(Instruction Tuning)
- 解冻 LLM(有时也解冻投影层),在视觉指令数据集上进行微调。
- 数据格式为多轮对话:用户上传图片并提出问题,助手基于图片内容回答。
- 这一阶段让 LLM 学会「看图说话」——不仅仅是描述图片,还包括推理、问答、遵循复杂指令。
5.4 GPT-4V 与 Gemini
闭源模型代表了多模态理解的商业前沿:
- GPT-4V (GPT-4 with Vision):OpenAI 在 GPT-4 基础上增加视觉理解能力。用户可以直接上传图片并就图片内容提问。GPT-4V 在医学影像分析、图表理解、UI 识别等专业领域展现了惊人的能力。
- Gemini:Google DeepMind 从头设计的多模态模型,原生支持文本、图像、音频、视频、代码等多种模态的输入和输出。它的目标是在预训练阶段就让模型接触多种模态的数据,而不是后期拼接。
6. 多模态对齐:连接不同世界的桥梁
回顾多模态模型的发展,一个贯穿始终的主题是模态对齐——如何在不同模态的表示之间建立有意义的对应关系。
6.1 对齐的三个层次
数据层面对齐:在多模态数据中寻找天然的对应关系。例如,网页中的图片和周围的文字,视频中的画面和旁白/字幕。CLIP 使用了 4 亿对 web 上的图文数据。
表示层面对齐:通过对比学习等训练目标,将不同模态的表示拉近到同一空间中的相近位置。这是 CLIP 的核心贡献。
语义层面对齐:不仅仅是浅层的图文匹配,而是实现深层的语义理解和跨模态推理。例如,能否从一张医学影像中推断出诊断结论,或从一段代码的截图理解其逻辑。
6.2 当前的对齐方法
| 方法 | 对齐方式 | 代表模型 |
|---|---|---|
| 对比学习 | 拉近匹配对,推远非匹配对 | CLIP, ALIGN, SigLIP |
| 生成式对齐 | 从一种模态生成另一种模态 | DALL-E, Stable Diffusion |
| 桥接式对齐 | 通过一个中间表示连接两种模态 | LLaVA, BLIP-2 (Q-Former) |
| 原生多模态 | 在预训练阶段就混合多种模态 | Gemini, GPT-4o |
6.3 Q-Former:可学习的查询桥接
BLIP-2 中提出的 Q-Former(Querying Transformer) 是另一种重要的对齐结构。它与 LLaVA 的线性投影层不同:
- Q-Former 使用一组可学习的 query token,通过交叉注意力(cross-attention)从冻结的视觉编码器输出中提取与文本最相关的视觉信息。
- 这些 query token 的输出再被送入冻结的 LLM。
- Q-Former 同时训练三个目标:图文对比学习(与 CLIP 类似)、图文匹配(二分类判断是否匹配)、图文生成(基于图像生成文本描述)。
这种设计的优势在于:Q-Former 是一个「瓶颈」,它学会了从丰富的视觉特征中筛选出 LLM 最需要的信息,减少了传递给 LLM 的视觉 token 数量,从而提高了效率。
7. 多模态的现状与展望
7.1 技术趋势
- 原生多模态:从「先训练单模态编码器再拼接」到「从头用多模态数据训练统一模型」。GPT-4o、Gemini 是这一趋势的代表。
- 任意到任意(Any-to-Any):不仅支持文本+图像输入,还支持音频、视频输入,而且能生成文本、图像、音频、语音等多种输出。
- 多模态 Agent:结合视觉感知和工具使用。例如,一个 Agent 可以「看」屏幕截图、理解 UI 元素、然后执行操作。
- 高效多模态:如何在资源受限的设备上运行多模态模型?量化、蒸馏、参数高效微调(如 LoRA)被广泛应用于多模态模型。
7.2 关键挑战
- 长视频理解:理解一小时的视频需要处理大量帧,同时对时序关系进行建模。当前方法受限于上下文窗口和计算成本。
- 细粒度对齐:在一张复杂的图片中精确地定位到文本描述的特定区域(如「左边第三个穿红衣服的人」)。
- 幻觉问题:多模态模型也会产生幻觉——描述图像中不存在的内容,或将两段不相关的信息错误地组合在一起。
- 多语言多模态:当前最强的多模态模型主要以英语为中心,对其他语言的支持仍有差距。
本章总结
从 CLIP 到 LLaVA,多模态模型在过去几年取得了令人瞩目的进步。核心思想的演进脉络清晰可见:
- CLIP 用对比学习将图像和文本映射到同一个向量空间,实现了图文对齐和零样本分类。
- DALL-E / Stable Diffusion 实现了从文本表示生成图像,证明了文本嵌入包含了生成图像所需的语义信息。
- LLaVA 将视觉编码器与 LLM 连接,让大语言模型「看懂」图像并回答相关的问题。
这一演进的核心驱动力是模态对齐——在不同模态的数据之间建立语义对应关系。一旦这个桥梁建立起来,两个世界的信息就可以相互流动、互相增强。
在接下来的章节中,我们将看到这些多模态能力如何被整合到 RAG 系统和 AI Agent 中,构建更强大的智能应用。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Radford, A., Kim, J. W., Hallacy, C., et al. (2021). Learning Transferable Visual Models From Natural Language Supervision. ICML 2021. (CLIP) [arXiv:2103.00020]
- Liu, H., Li, C., Wu, Q., & Lee, Y. J. (2023). Visual Instruction Tuning. NeurIPS 2023. (LLaVA) [arXiv:2304.08485]
- Li, J., Li, D., Savarese, S., & Hoi, S. (2023). BLIP-2: Bootstrapping Language-Image Pre-training with Frozen Image Encoders and Large Language Models. ICML 2023. [arXiv:2301.12597]
- Ramesh, A., Dhariwal, P., Nichol, A., et al. (2022). Hierarchical Text-Conditional Image Generation with CLIP Latents. (DALL-E 2) [arXiv:2204.06125]
- Alayrac, J.-B., et al. (2022). Flamingo: a Visual Language Model for Few-Shot Learning. NeurIPS 2022. [arXiv:2204.14198]
- OpenAI (2023). GPT-4 Technical Report. [arXiv:2303.08774]