s11b Vision Transformer:当 Transformer 遇见图像
2020 年,Google 用一篇《An Image is Worth 16x16 Words》证明:把图像切成 patch 当词序列,扔进标准 Transformer,就能超越 CNN。
1. CNN 的局限与 Transformer 的机会
从 LeNet(1998)到 EfficientNet(2019),卷积神经网络统治了计算机视觉整整二十年。CNN 之所以成功,很大程度上归功于两个内置的归纳偏置(inductive bias):
- 局部性(locality):卷积核只关注局部邻域(
或 ),假设图像中相邻像素比远距离像素更有关系 - 平移不变性(translation invariance):同一个卷积核在图像各处共享权重,无论物体在左上角还是右下角,检测方式都一样
这些归纳偏置在数据量有限的场景下是巨大的优势——模型不需要从零学习"相近像素有关联"这个常识,开箱即用。但这也是 CNN 的"紧箍咒":局部连接意味着浅层卷积核看不到全局关系,必须通过堆叠很多层来逐步扩大感受野;而权重共享虽然高效,却也限制了模型对不同区域采用不同处理策略的灵活性。
与此同时,NLP 领域经历了翻天覆地的变化。2017 年的 Transformer 架构完全抛弃了 RNN 的循环结构,仅靠自注意力机制(self-attention)让序列中每个位置同时关注所有其他位置。BERT(2018)和 GPT 系列(2018-2020)证明了 Transformer 在大规模文本数据上的表征学习能力远超 LSTM。
这引出了一个自然的问题:如果 Transformer 在 NLP 中如此成功,我们能不能把它用到图像上?
之前也有人尝试——比如 Image Transformer(2018)用自注意力生成图像像素,但复杂度是
答案就是 Patch。
2. ViT 核心思想:图像就是一个 Patch 序列
Vision Transformer(ViT,Dosovitskiy et al., 2020)的洞见极其简洁,几乎可以说是"暴力":
把图像切成一个个小方块(patch),每个 patch 当作 NLP 中的一个"词",然后把整串 patch 扔进标准 Transformer 编码器。
不需要修改 Transformer 的任何结构,不需要卷积,不需要特殊的视觉归纳偏置——整个模型就是一个纯 Transformer。
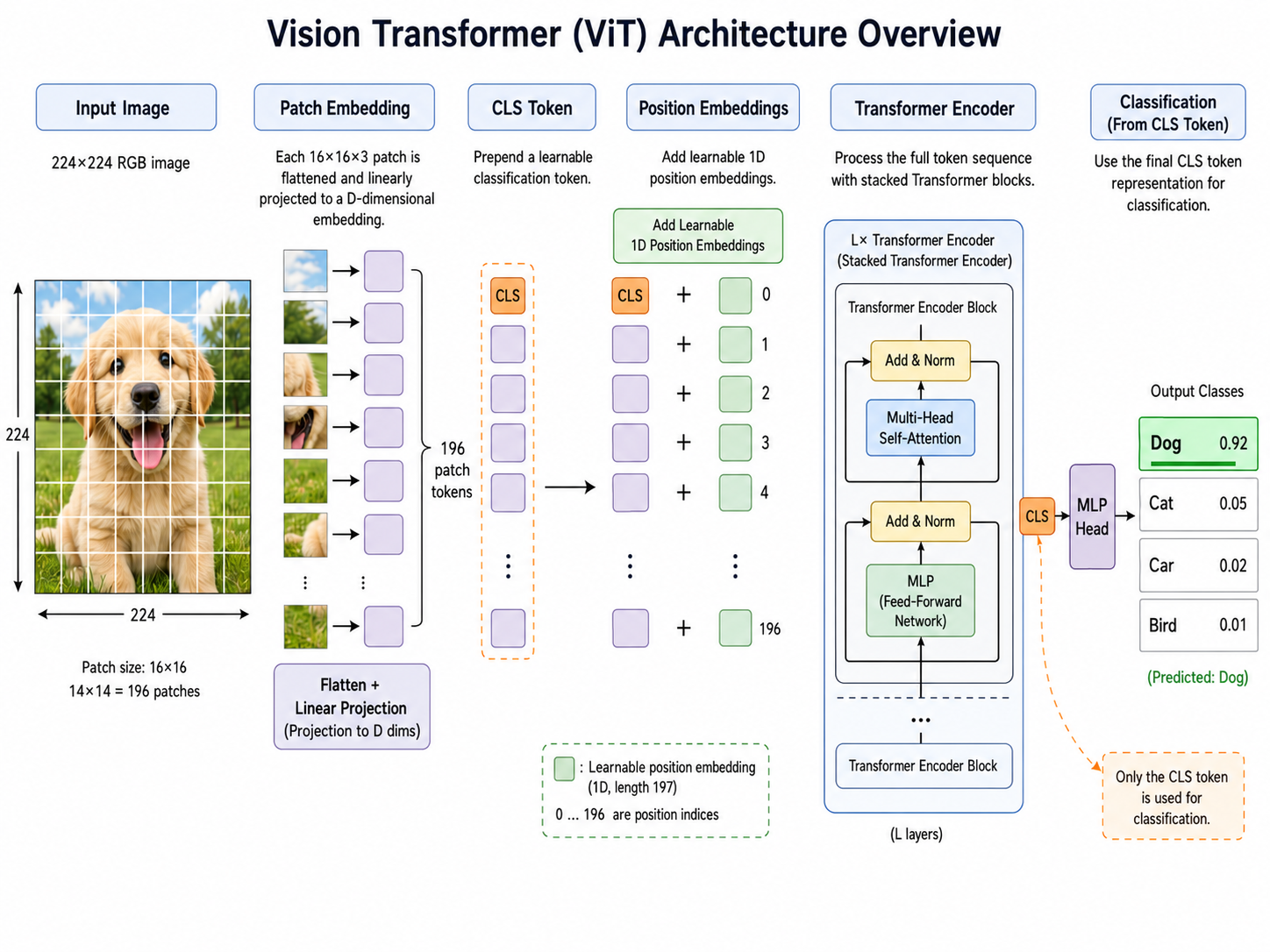
2.1 整体流程
给定一张
Step 1 — Patch Embedding:将图像均匀切成
Step 2 — CLS Token + Position Embedding:在序列开头拼接一个可学习的 [class] token(记为 [CLS]。然后对所有
Step 3 — Transformer Encoder:将序列送入
Step 4 — Classification Head:取 [class] token 的最终输出
2.2 数学公式
完整的前向传播可以用以下公式描述:
输入预处理:
其中
第
其中多头自注意力的计算为:
分类输出:
其中 [class] token 在第
2.3 一个关键细节:为什么用 1D 位置编码而不是 2D?
直觉上,图像有明确的 2D 空间结构,应该使用 2D 位置编码(行编码 + 列编码)。但 ViT 的实验表明:1D 和 2D 位置编码的效果几乎没有差异。这是因为模型可以通过学习到的位置嵌入隐式地推断 2D 空间关系——Transformer 有足够的能力自己学。
2.4 模型规格
ViT 论文提供了三种主要规格,与 BERT 的命名风格一致:
| 模型 | 层数 | 隐藏维度 | MLP 维度 | 头数 | 参数量 |
|---|---|---|---|---|---|
| ViT-Base | 12 | 768 | 3072 | 12 | 86M |
| ViT-Large | 24 | 1024 | 4096 | 16 | 307M |
| ViT-Huge | 32 | 1280 | 5120 | 16 | 632M |
注意:这些参数量与 BERT 几乎完全相同——这正是"不改 Transformer"的结果。ViT 的 Transformer 编码器与 BERT 的 Transformer 编码器在数学上完全一样。
3. Patch Embedding:从像素到 Token
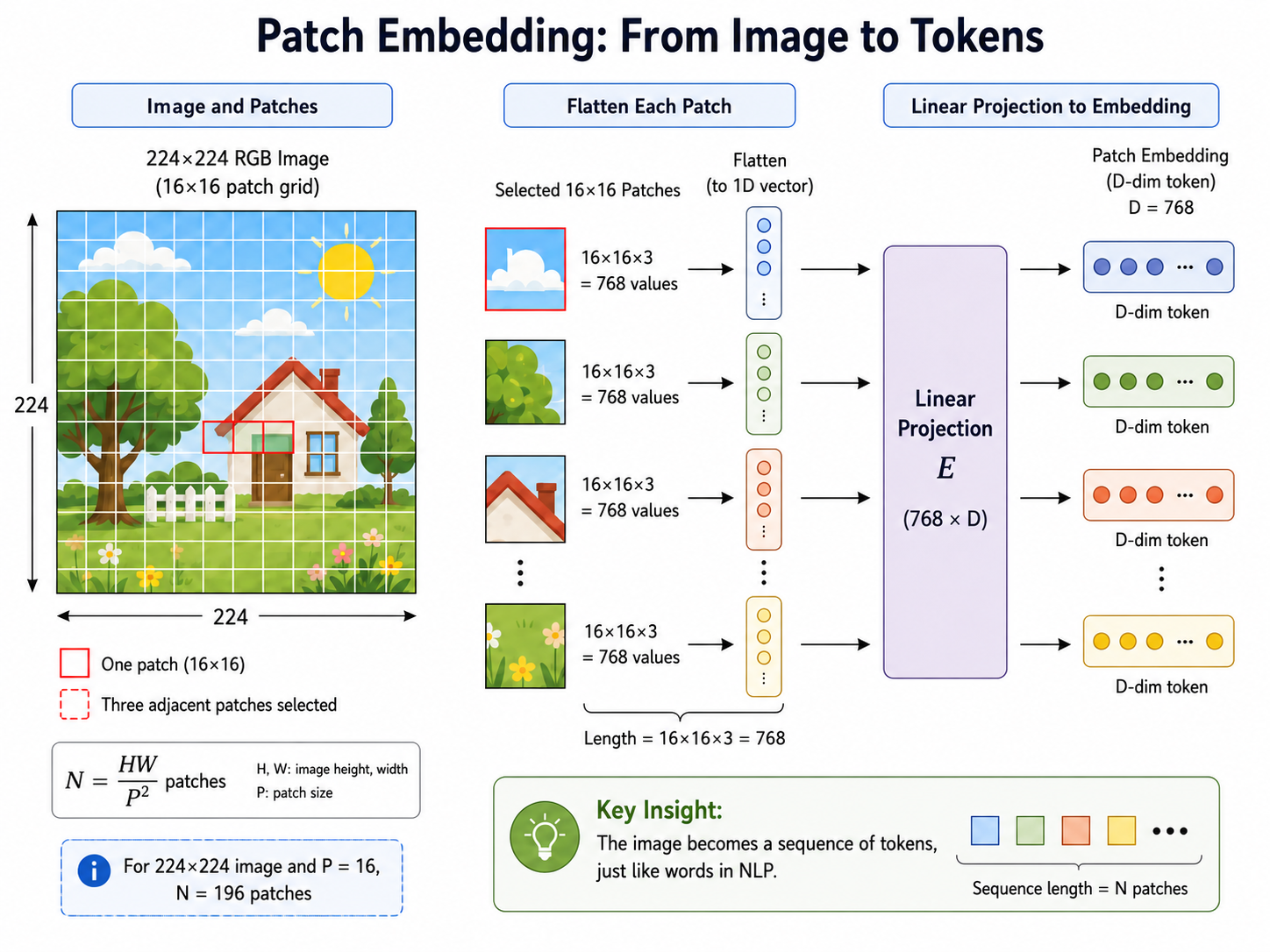
Patch Embedding 是 ViT 中唯一与 NLP 不同的组件,也是它"连接两个世界"的桥梁。让我们深入其数学细节。
3.1 操作分解
给定图像
切分:将图像切分为
个互不重叠的 patch。每个 patch 的形状为 。 展平:将每个 patch 展开为一个 1D 向量
。对于 ViT-Base( ), 。 线性投影:通过一个可学习的投影矩阵
将每个 patch 向量映射到 维嵌入空间: 序列化:将所有 token 排列为一个序列
。
3.2 实现:Conv2d 技巧
在实践中,patch embedding 不需要手动切分再投影。一个更优雅(且更高效)的实现是使用卷积:
这个 Conv2d 的 kernel 大小和 stride 都设为
3.3 CLS Token 和位置编码
在 token 序列构造完成后,ViT 做了两个额外的操作:
CLS Token:在序列开头拼接一个可学习的参数
位置编码:由于自注意力本身不具备顺序感知能力(它是排列等变的),需要给每个 token 注入位置信息。ViT 使用可学习的 1D 位置编码
训练完成后,位置编码
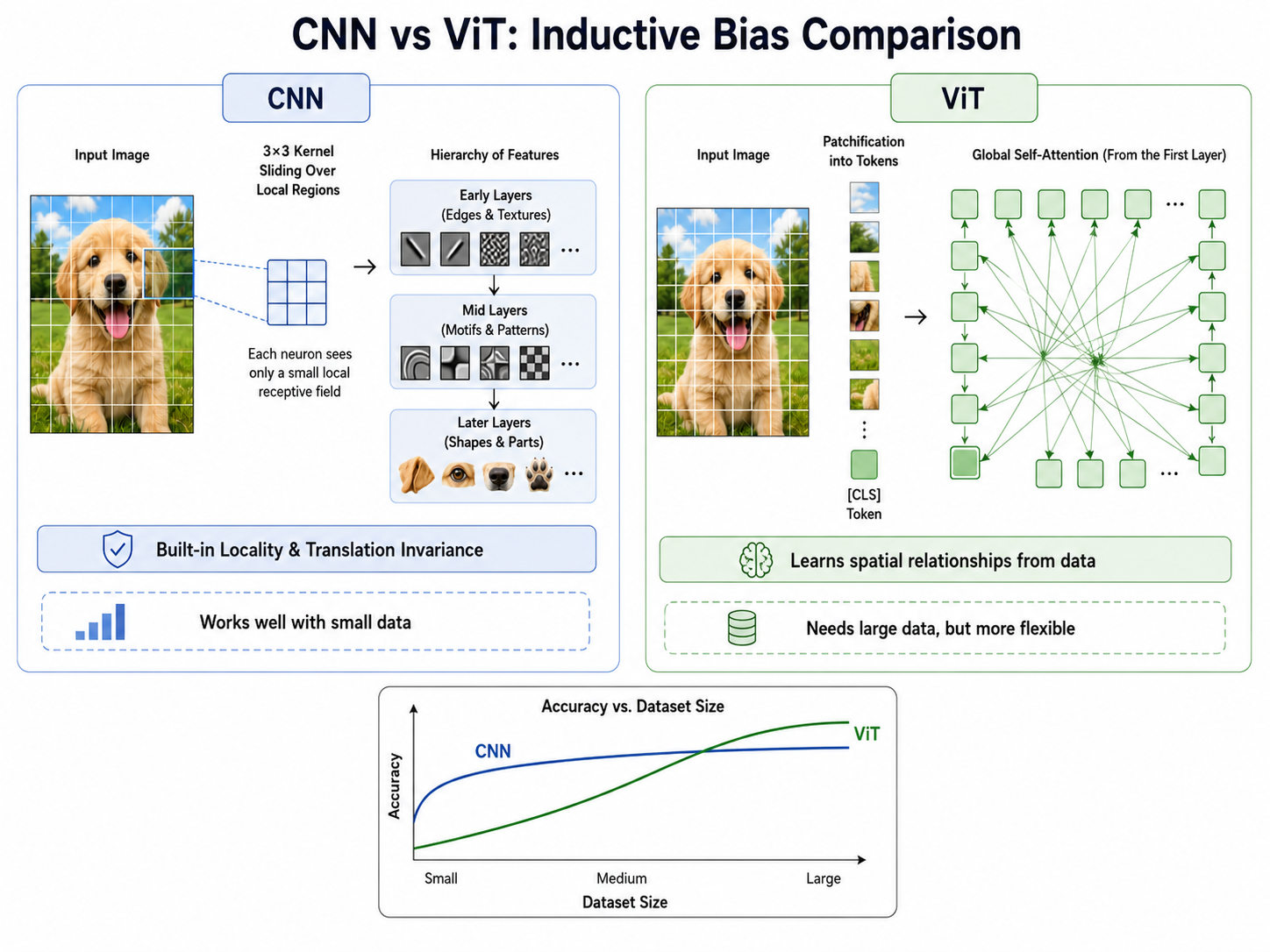
4. ViT vs CNN:归纳偏置的博弈
ViT 和 CNN 的根本差异在于它们对视觉世界的"先验假设"不同。
4.1 归纳偏置对比
| 维度 | CNN | ViT |
|---|---|---|
| 局部性 | 内置( | 无。需要从数据中学习"近处有关联" |
| 平移等变性 | 内置(权重共享 + 滑动窗口) | 无。位置关系由位置编码提供,不是结构保证 |
| 全局感受野 | 需要多层堆叠才能获得 | 第一层即可(自注意力全体交互) |
| 数据效率 | 高。少量标记数据即可 | 低。需要极大量数据才能弥补归纳偏置的缺失 |
| 可扩展性 | 相对受限 | 极强。随数据量增长性能持续提升,不像 CNN 那样趋于饱和 |
| 计算复杂度 |
4.2 数据尺度是关键变量
ViT 论文中有一个核心发现:
- 在小数据集上(如 ImageNet-1K,130 万张):ViT 不如同等规模的 CNN(如 ResNet)。因为没有局部性先验,模型需要自己从零学,数据不够。
- 在中等数据集上(如 ImageNet-21K,1400 万张):ViT 与 CNN 持平或略优。
- 在大数据集上(如 JFT-300M,3 亿张):ViT 全面超越 CNN,表现出未饱和的扩展性。
这揭示了一个深刻的 trade-off:归纳偏置 = 数据效率 + 灵活性上限之间的权衡。
- CNN 的强归纳偏置使它在小数据时"起点高",但这些假设也限制了它对长尾模式的学习能力
- ViT 几乎没有任何视觉特定的归纳偏置,起点低,但上限高——给足够的数据和参数量,它能学到比 CNN 更灵活、更通用的视觉表征
4.3 什么时候用 ViT?什么时候用 CNN?
优先使用 CNN 的场景:
- 数据量有限(数万到数十万张图像)
- 对实时性要求极高的边缘设备
- 需要精确定位的结构化任务(CNN 的特征图天然保留空间结构)
优先使用 ViT 的场景:
- 有大规模训练数据(百万级以上)
- 有强大的预训练模型可用(ImageNet-21K 或更大的预训练)
- 需要统一架构处理多模态(文本 + 图像 → 同一个 Transformer)
在实际工程中,一个实用的策略是:如果数据量<10 万张,用 CNN 从零训练;如果数据量>10 万张,用预训练 ViT 微调。
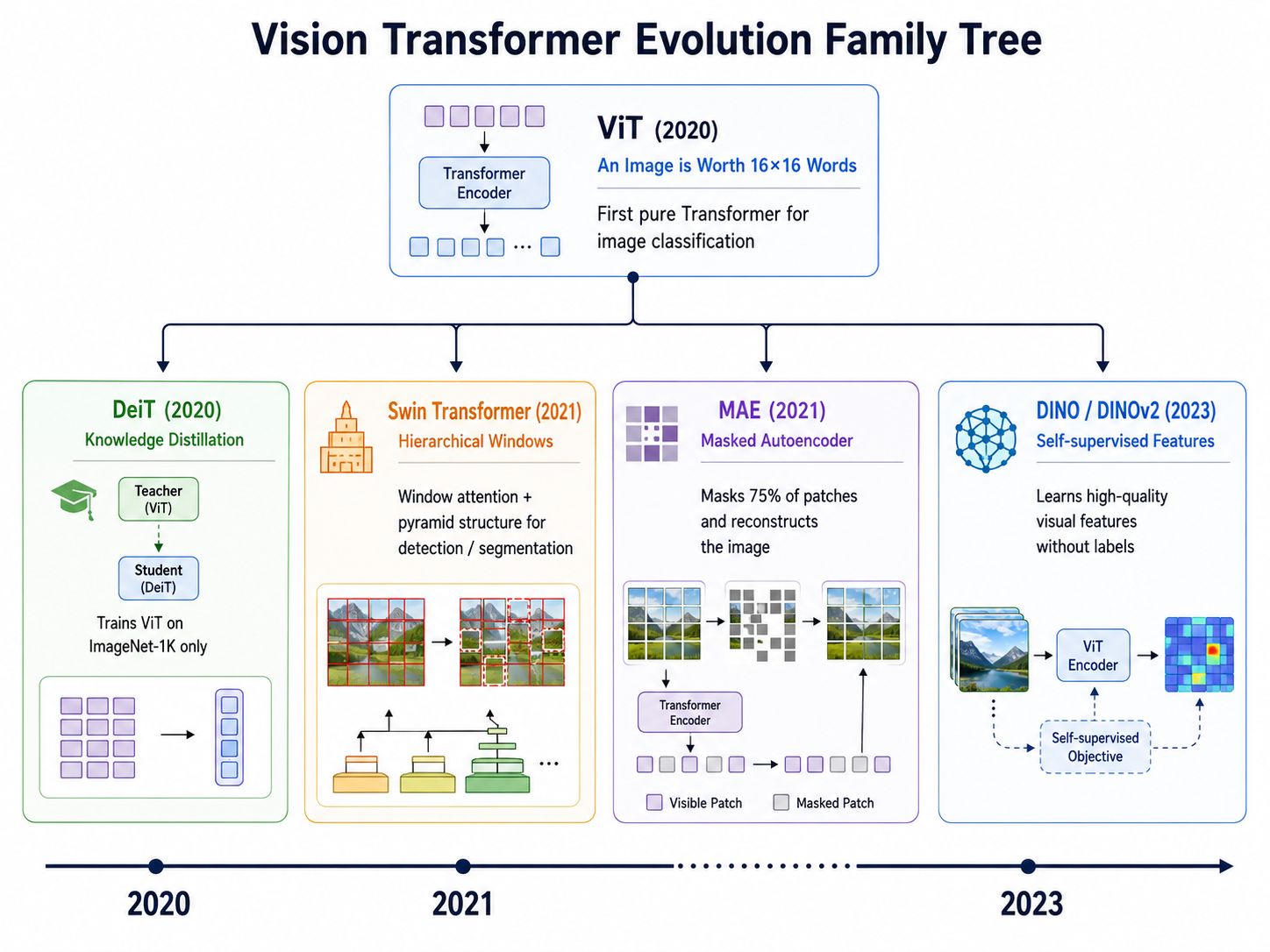
5. ViT 进化树
ViT 只是一个起点。后续研究从不同角度对它进行了改进和扩展,形成了一个庞大的 ViT "家族"。
5.1 DeiT (2020):让 ViT 在 ImageNet-1K 上也能用
ViT 的最大痛点是需要海量数据(如 JFT-300M)预训练。Facebook 的 DeiT(Data-efficient Image Transformers)通过知识蒸馏解决了这个问题:用一个预训练的 CNN(作为 teacher)来指导 ViT 的训练,只用一个额外的蒸馏 token 和蒸馏损失。DeiT 只用 ImageNet-1K(无需 ImageNet-21K 或 JFT)就达到了与 CNN 竞争的性能。
核心公式:在原有分类损失上增加蒸馏损失
5.2 Swin Transformer (2021):为密集预测而生
原始 ViT 输出的是固定分辨率的特征图(所有 patch 在每层保持相同数量),不适合需要多尺度特征图的检测和分割任务。微软的 Swin Transformer 引入了两个关键设计:
- 窗口注意力(Window Attention):将特征图划分为不重叠的窗口,自注意力只在窗口内计算,将复杂度从
降为 ( 是窗口大小) - 层级结构:像 CNN 一样逐步下采样,构建特征金字塔,与 FPN/Mask R-CNN 等检测分割架构无缝对接
Swin Transformer 获得了 ICCV 2021 最佳论文奖(马尔奖)。
5.3 MAE (2021):BERT 式的自监督 ViT
Kaiming He 等人的 MAE(Masked Autoencoder)将 BERT 的"掩码语言模型"思想搬到了视觉:随机遮挡图像的 75% patch,让 ViT 编码器只看到剩余的 25%(节省大量计算),然后用一个轻量级解码器尝试重建被遮挡的 patch。这个看似简单的任务迫使 ViT 学习到了极高质量的视觉表征。
MAE 的巧思在于:图像的信息密度远低于文本,遮掉 75% 的 patch 并不妨碍理解图像内容——这正是自监督学习在视觉上成功的秘诀。
5.4 DINO / DINOv2 (2021-2023):自监督的巅峰
Meta AI 的 DINO 和 DINOv2 系列通过自蒸馏(student-teacher 框架,无标签训练)让 ViT 学到了令人惊叹的特征表示。DINO 的注意力图能自动分割出图像中的物体——整个过程没有接触到任何分割标注。DINOv2 更进一步,在亿级图像上训练,产生的视觉特征可以零样本迁移到图像检索、深度估计、语义对应等多种下游任务。
DINOv2 被视为视觉领域的"GPT 时刻"——一个足够大的自监督 ViT 可以学会通用的视觉表示,无需微调即可应用于多种任务。
6. 实战:ViT vs CNN on CIFAR-10
本章节配套的 vit_demo.py 演示代码从三个方面展示了 ViT 的特性:
1. 从零实现 ViT:代码以 ~200 行 PyTorch 完整实现了 Patch Embedding、多头自注意力、Transformer Encoder Block 和 SimpleViT 模型,不依赖任何预训练库。阅读这份代码可以让你彻底理解 ViT 的内部机制。
2. 三模型对比:
- SimpleViT(从零训练):展示纯 ViT 在小数据集上的表现
- ResNet-18(从零训练):CNN 基线,展示归纳偏置优势
- ViT-B/16(预训练 + 微调):展示预训练如何弥补 ViT 的数据需求
3. 关键结果预期:
- SimpleViT 从零训练在 CIFAR-10(仅 5 万张训练图像)上通常只能达到 60-75% 准确率
- ResNet-18 从零训练可以达到 85-92%
- 预训练 ViT-B/16 微调后可达 95%+
4. CPU 友好设计:代码自动检测 GPU 可用性。CPU 模式下使用小型 ViT(embed_dim=192, depth=4),3 个 epoch 快速演示。GPU 模式下使用更大模型和更多 epoch 获得有意义的结果。
5. 生成图表:
vit_accuracy_comparison.png:模型准确率柱状图vit_training_curves.png:训练 Loss 和测试准确率变化曲线
运行方式:
cd s11b_vit/code
python vit_demo.py7. ViT 为什么改变了计算机视觉
ViT 的意义远远超越了"又一个 SOTA 模型"。它是一个范式转换的信号。
7.1 统一架构
在 ViT 之前,CV 和 NLP 是两套完全不同的方法论:CV 用卷积、池化、全连接;NLP 用 RNN、LSTM、Attention。ViT 证明了一件关键的事:Transformer 可以不加修改地处理图像。
这意味着我们可以用同一套架构处理所有模态——文本、图像、视频、音频、蛋白质结构。这个统一性为多模态模型(如 CLIP、LLaVA、GPT-4V)奠定了基础。当 Vision Encoder 和 Language Model 共享同一种"语言"(Transformer block),它们的输出可以自然地拼接、交叉注意力、联合优化。
7.2 CLIP 和视觉-语言对齐
OpenAI 的 CLIP(Contrastive Language-Image Pre-training)使用 ViT 作为图像编码器,与文本编码器并行训练,通过对比学习将图像和文本映射到同一个嵌入空间。CLIP 展示了 ViT 的另一个关键能力:它的特征空间比 CNN 更加"语义化",与文本特征空间的对齐更加自然。
这是 CNN 难以做到的——CNN 的特征偏底层(纹理、边缘),而 ViT 通过自注意力学习的特征天然带有更强的语义关联。
7.3 从 ViT 到多模态大模型
现代的多模态大模型几乎都采用 ViT 作为视觉 backbone:
- Flamingo / OpenFlamingo:ViT + Perceiver Resampler → 注入语言模型
- LLaVA:ViT-L → 线性投影 → 输入 LLaMA
- GPT-4V:据推测使用 ViT 编码图像,输出 token 直接拼接到文本 token 序列中
- Gemini:Google 的视觉编码器同样是 ViT 变体
可以说,ViT 不仅是图像分类的里程碑,更是通往通用多模态智能的钥匙。
7.4 未来展望
ViT 仍在快速进化中。几个值得关注的方向:
- 更高效的注意力机制:Flash Attention、Linear Attention 等将复杂度从
进一步降低 - 更好的位置编码:RoPE(旋转位置编码)从 NLP 迁移到视觉,带来了更好的长度泛化能力
- ViT + 扩散模型:DiT(Diffusion Transformer)用 ViT 替代 U-Net 作为扩散模型的 backbone,在图像和视频生成领域表现优异
- 任意分辨率:FlexiViT、NaViT 等研究了如何让 ViT 处理任意分辨率和长宽比的输入
本章总结
Vision Transformer 的故事是一个关于"简单 vs 精致"的寓言:
- 卷积神经网络用 20 年时间积累了大量精巧的设计——局部连接、权重共享、池化、多尺度特征金字塔、残差连接——每一个都是针对视觉问题量身的优化。
- ViT 几乎抛弃了所有视觉特定的设计,只保留了最纯粹的自注意力。它用一个极其简单的假设("图像 = patch 序列")连接了 CV 和 NLP 两个领域。
- 这个"简单"换来了"通用"——当数据和参数量足够大时,通用性比精巧设计更有价值。
ViT 给我们最大的启示或许是:在数据和算力充沛的时代,简单且可扩展的架构往往优于精巧但受限的架构。 CNN 没有过时(ConvNeXt 证明了现代化 CNN 仍然强大),但 Transformer 已经成为连接视觉、语言和更多模态的共同语言。
下一节 s13 图像生成 将从"理解图像"转向"创造图像"——GAN 的对抗博弈、VAE 的潜空间和扩散模型的渐进去噪。
参考
- Dosovitskiy, A., et al. "An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale." ICLR 2021. [arXiv:2010.11929]
- Touvron, H., et al. "Training data-efficient image transformers & distillation through attention." ICML 2021. (DeiT) [arXiv:2012.12877]
- Liu, Z., et al. "Swin Transformer: Hierarchical Vision Transformer using Shifted Windows." ICCV 2021. [arXiv:2103.14030]
- He, K., et al. "Masked Autoencoders Are Scalable Vision Learners." CVPR 2022. (MAE) [arXiv:2111.06377]
- Caron, M., et al. "Emerging Properties in Self-Supervised Vision Transformers." ICCV 2021. (DINO) [arXiv:2104.14294]
- Oquab, M., et al. "DINOv2: Learning Robust Visual Features without Supervision." 2023. [arXiv:2304.07193]
- Radford, A., et al. "Learning Transferable Visual Models From Natural Language Supervision." ICML 2021. (CLIP) [arXiv:2103.00020]
📥 Code
| File | View | Download |
|---|---|---|
| vit_demo.py | Open | Download |