s08 优化器:从 SGD 到 Adam
拿到了梯度,怎么用?Momentum、RMSProp、Adam 一步步解决梯度下降的困境
一、回顾:梯度下降的基本公式
在 s07 多层网络的矩阵反传 中,我们学会了如何计算每个参数的梯度。现在的问题是:有了梯度
最基本的随机梯度下降(Stochastic Gradient Descent, SGD)更新公式是:
其中
这行公式简单优美,但在实践中会遇到一系列问题。本节的目标就是:理解每个问题是什么,以及 Momentum、RMSProp、Adam 分别如何解决它们。
二、朴素 SGD 的四大问题
问题 1:同一学习率,不同参数尺度
神经网络的不同层、甚至同一层的不同参数,它们的梯度尺度可能天差地别:
- 靠近输出的层梯度通常较大
- 某些参数的梯度可能只有
,而另一些参数的梯度可能是
如果对所有参数使用相同的学习率
问题 2:Mini-batch 噪声导致方向抖动
真实的梯度应该是所有训练数据上的平均。但我们每次只能用一个 mini-batch 来估计,这个估计带有噪声。噪声会让更新方向在每次迭代中随机抖动,而不是平滑地指向最小值。
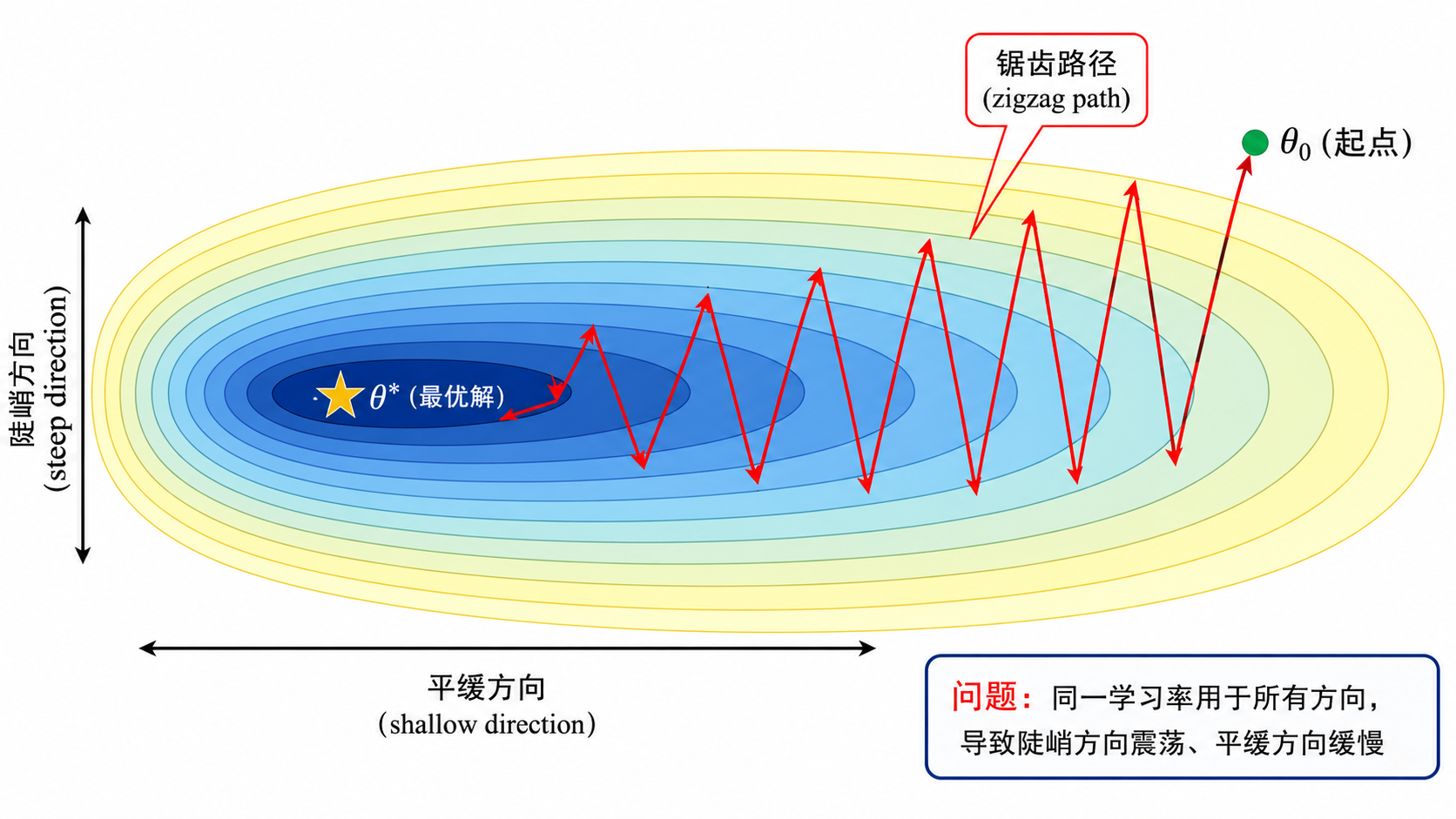
问题 3:狭长峡谷中的锯齿震荡
很多损失函数在高维空间中的形状类似于狭长的峡谷(elongated valley)——在某些方向上曲率很大(梯度很大),在另一些方向上曲率很小(梯度很小)。SGD 在这种地形上的表现是:
- 在陡峭方向上来回震荡(一步跨太大,下一步又跨回来)
- 在平缓方向上进展极慢(步长相对太小)
- 总体路径呈现锯齿状(zigzag)
问题 4:学习率调度的两难
学习率太大:训练初期快速下降,但后期可能震荡甚至发散。 学习率太小:训练稳定但极为缓慢。 理想情况是:训练初期用较大的学习率快速探索,后期用小学习率精细收敛——这就需要学习率调度策略。
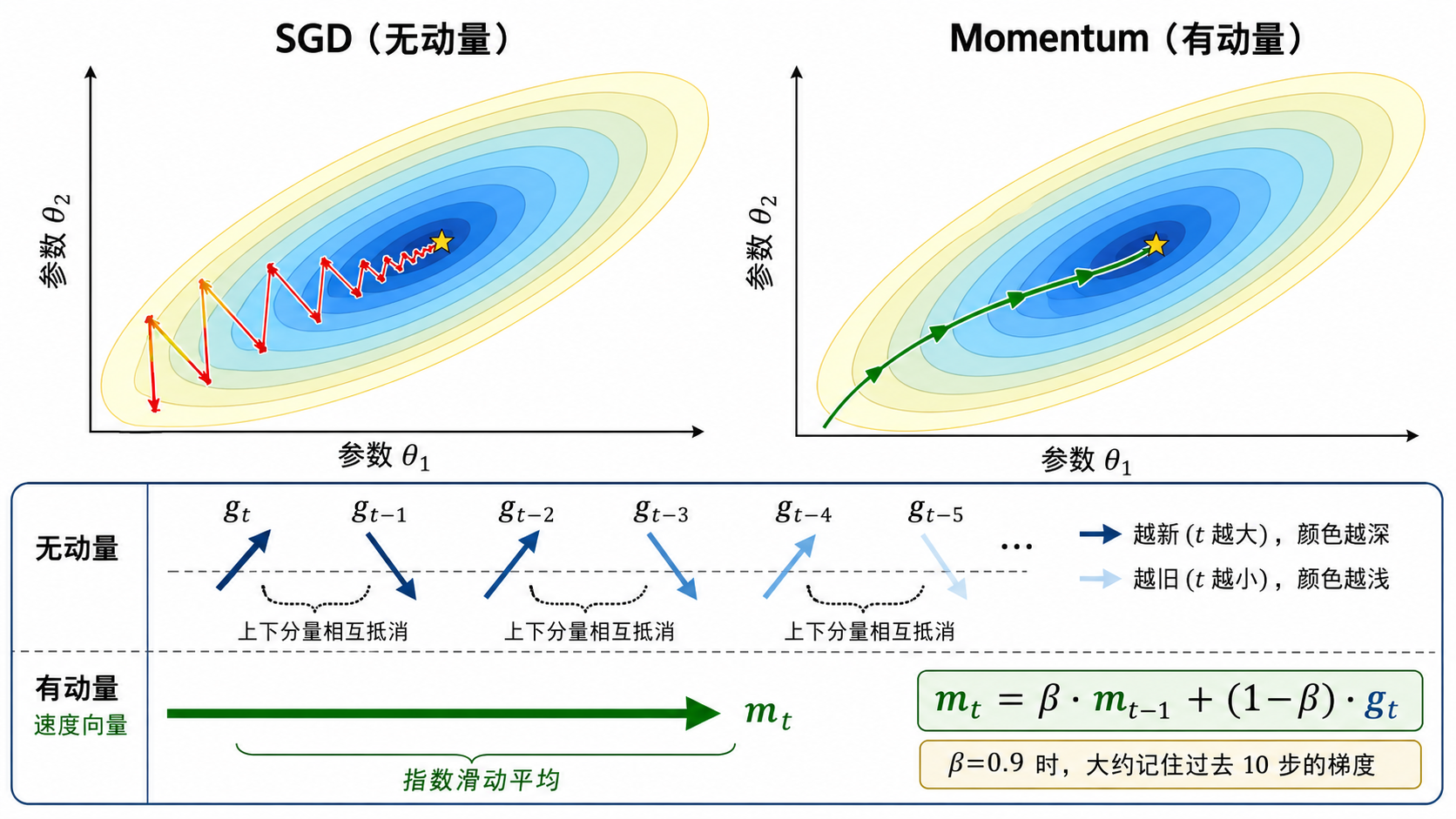
三、Momentum:给优化器加一个"惯性"
Momentum 的灵感来自物理学:一个球滚下山坡时,不会在每一步都改变方向——它的速度具有惯性,沿历史方向继续前进。
数学定义
Momentum 引入了一个速度
参数更新变为:
其中
直观理解
是"长期的平均方向":如果最近几步的梯度方向一致, 会积累一个较大的值,让参数快速前进。 - 震荡方向互相抵消:如果在某个方向上来回震荡,正负梯度交替出现,
会自动让这些震荡平滑掉。 控制记忆长度: 意味着当前梯度只占 10% 的权重,过去梯度占 90%。大致可以理解为"记住了过去 步的梯度"。
Momentum 的效果
Momentum 解决了"方向抖动"的问题——更新路径变得更平滑,在狭长峡谷中震荡减少,收敛速度加快。但它没有解决"不同参数应该用不同步长"的问题。
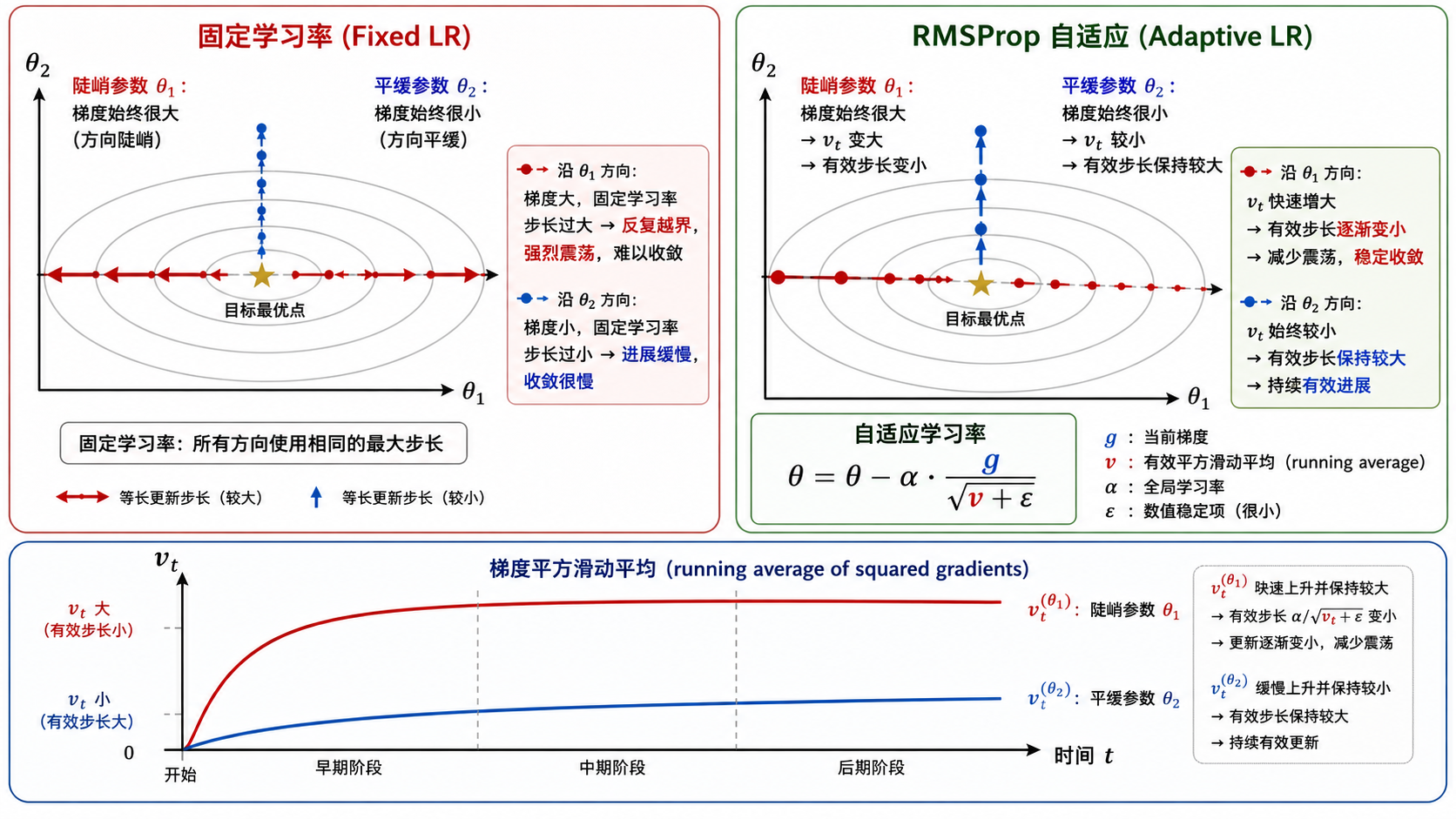
四、RMSProp:给每个参数自适应步长
RMSProp(Root Mean Square Propagation)的思路完全不同:它不关心方向是否平滑,而是关心每个参数的历史梯度有多大,然后据此自适应地调整每个参数的有效学习率。
数学定义
RMSProp 维护梯度平方的指数滑动平均:
注意这里的
参数更新变为:
直观理解
- 如果某个参数的历史梯度很大 →
大 → 有效步长 小 → 防止在这个方向震荡 - 如果某个参数的历史梯度很小 →
小 → 有效步长 大 → 加速在这个方向前进 是一个极小值(通常 ),防止分母为零
RMSProp 的效果
RMSProp 解决了"不同参数需要不同步长"的问题。在狭长峡谷中,陡峭方向的步长被自动压小,平缓方向的步长被自动放大——优化路径不再锯齿震荡。
但它没有像 Momentum 那样平滑更新方向——它仍然使用原始梯度
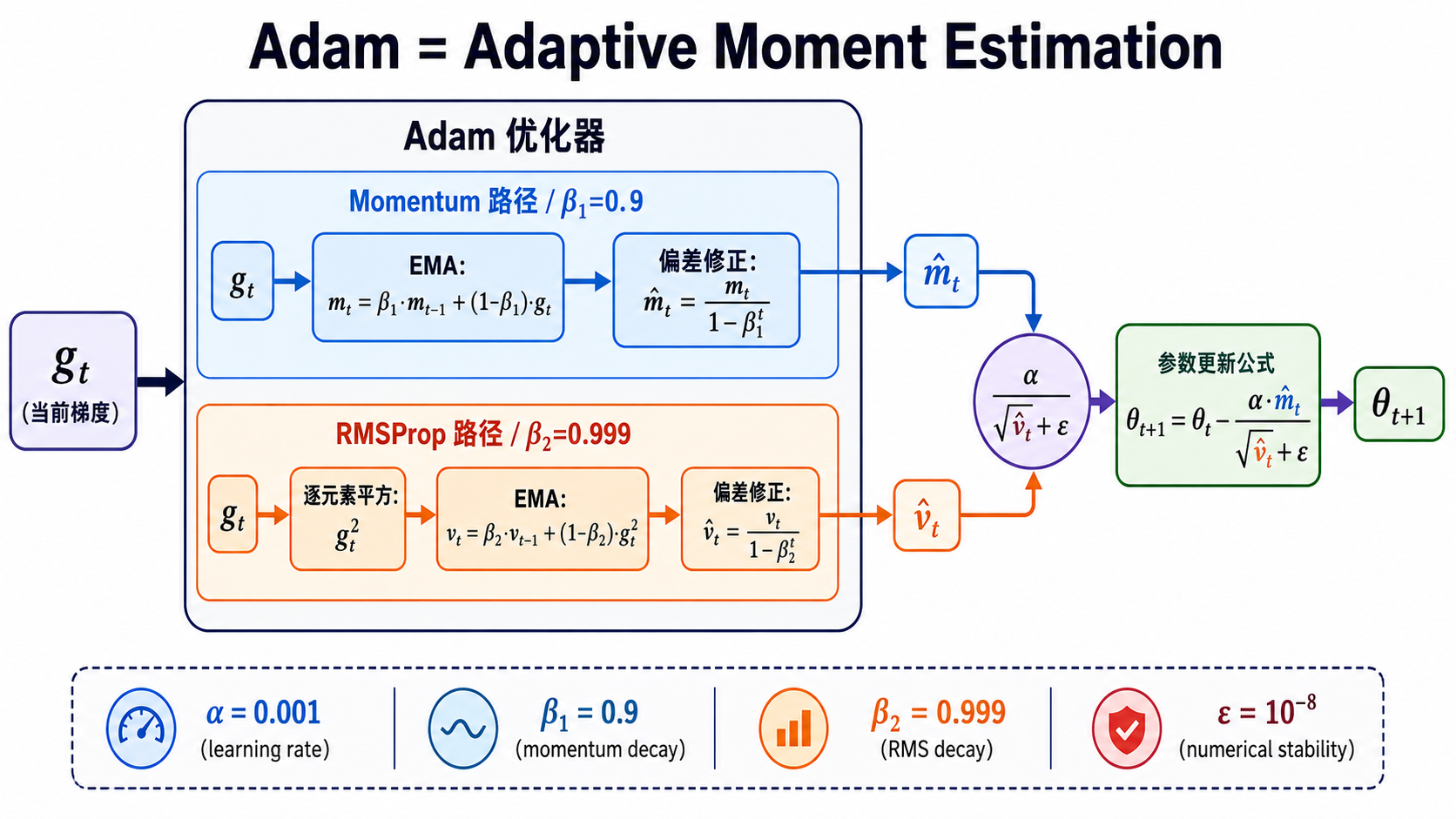
五、Adam:Momentum + RMSProp = 自适应矩估计
Adam 的全称是 Adaptive Moment Estimation。顾名思义,它同时拥有 Momentum 的方向平滑和 RMSProp 的自适应步长。
数学定义
Adam 同时维护两个指数滑动平均:
一阶矩(均值,用于估计方向):
二阶矩(未中心化的方差,用于估计尺度):
然后对两者做偏差修正(详见 s09 Adam 深度解析):
最终的参数更新——这就是 Adam 的核心公式:
拆解这行公式
这行公式可以解读为三句话:
决定方向:长期来看应该往哪个方向走(Momentum 的贡献) 决定步长缩放:每个参数方向上的有效步长有多大(RMSProp 的贡献) 是全局学习率:控制总体的更新幅度
Adam 为什么好用?
- 上手容易:默认超参数(
)在大多数任务上就能工作得很好 - 对梯度尺度不敏感:无论梯度是
还是 ,自适应步长都会自动调整 - 收敛快:结合了方向平滑和自适应步长,训练初期的收敛速度通常远快于 SGD
- 对超参数鲁棒:相比 SGD 对学习率极其敏感,Adam 在较宽的学习率范围内都能工作
六、四种优化器的直观对比
对比表
| 方法 | 核心记忆 | 是否自适应步长 | 直觉 |
|---|---|---|---|
| SGD | 不记历史 | 否 | 当前梯度指哪走哪——像盲人下山 |
| Momentum | 记梯度平均方向 | 否 | 给更新方向加入惯性——像滚下山坡的球 |
| RMSProp | 记梯度平方平均 | 是 | 梯度大的方向步长变小——像在陡坡减速 |
| Adam | 同时记 | 是 | 方向更稳 + 步长自适应——集两者之长 |
在二维损失地形上的表现
在狭长峡谷形的 2D 损失函数上(如
- SGD:沿陡峭方向剧烈震荡,沿平缓方向缓慢前行,路径呈锯齿形
- Momentum:路径更平滑,震荡明显减少,但步长在所有方向上一致
- RMSProp:陡峭方向震荡极小(步长被压小),平缓方向进展快(步长被放大)
- Adam:兼具平滑的路径和自适应的步长,通常最快到达最小值
在
code/demo.py中,我们可视化地展示了这四种优化器在同一损失地形上的轨迹对比。
七、从算法演进看设计思想
回顾这四个优化器的演进历程,可以发现一条清晰的设计脉络:
- SGD 是最朴素的:相信每一步的梯度,直接往梯度反方向走。
- Momentum 发现:"只看当前一步不够,应该参考历史方向"——引入了一阶矩(均值)。
- RMSProp 发现:"不同参数不应该用同一个步长,历史梯度大的参数步子应该小一点"——引入了二阶矩(未中心化方差)。
- Adam 发现:"为什么不两者结合?"——同时用一阶矩定方向、二阶矩缩步长。
每一个改进都不是凭空出现的,而是针对前一个方法的具体痛点。理解了这种演进,你就真正理解了优化器设计的核心思想。
八、优化器的选择指南
什么时候用 SGD + Momentum?
- 当你对超参数调优有足够耐心,愿意精心调整学习率计划
- 在某些视觉任务(如图像分类)中,精心调度的 SGD+Momentum 的泛化性能可能优于 Adam
- 计算资源有限时(SGD 占用的显存最少,不需要存储
和 )
什么时候用 Adam?
- 大多数深度学习任务的默认选择
- 当你需要快速原型验证,不想在优化器调参上花太多时间
- 训练 Transformer、GAN、强化学习等对优化器敏感的任务
- 梯度稀疏的场景(如 NLP 中的词嵌入训练)
什么时候用 AdamW?
- 当你需要权重衰减的正则化效果(详见 s09)
- 现代 Transformer 和大模型训练的标准配置
- AdamW 是 Adam 在权重衰减方面的修正版,大多数场景下优先于 Adam
九、本节小结
| 概念 | 一句话 |
|---|---|
| SGD 的困境 | 同学习率、噪声抖动、狭长峡谷震荡、学习率难调 |
| Momentum 的 | 梯度的指数滑动平均——给更新方向加惯性 |
| RMSProp 的 | 梯度平方的指数滑动平均——给每个参数自适应步长 |
| Adam | |
| 分别控制一阶矩和二阶矩的记忆长度 | |
| 优化器选择 | Adam(或AdamW) 先跑通,再考虑精细调 SGD |
下一节 s09 Adam 深度解析与训练实战 将深入 Adam 的内部机制:偏差修正的数学原理、AdamW 为什么更好、以及如何在实际训练中诊断和调试优化器。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Robbins, H. & Monro, S. (1951). A Stochastic Approximation Method. Annals of Mathematical Statistics. (SGD 理论基础)
- Sutskever, I., Martens, J., Dahl, G., & Hinton, G. (2013). On the importance of initialization and momentum in deep learning. ICML 2013. (Momentum) [PMLR]
- Kingma, D. P. & Ba, J. (2015). Adam: A Method for Stochastic Optimization. ICLR 2015. [arXiv:1412.6980]
- Tieleman, T. & Hinton, G. (2012). Lecture 6.5: RMSProp. Coursera. (RMSProp)