决策树
1. 决策树的基本概念
1.1 决策树是什么
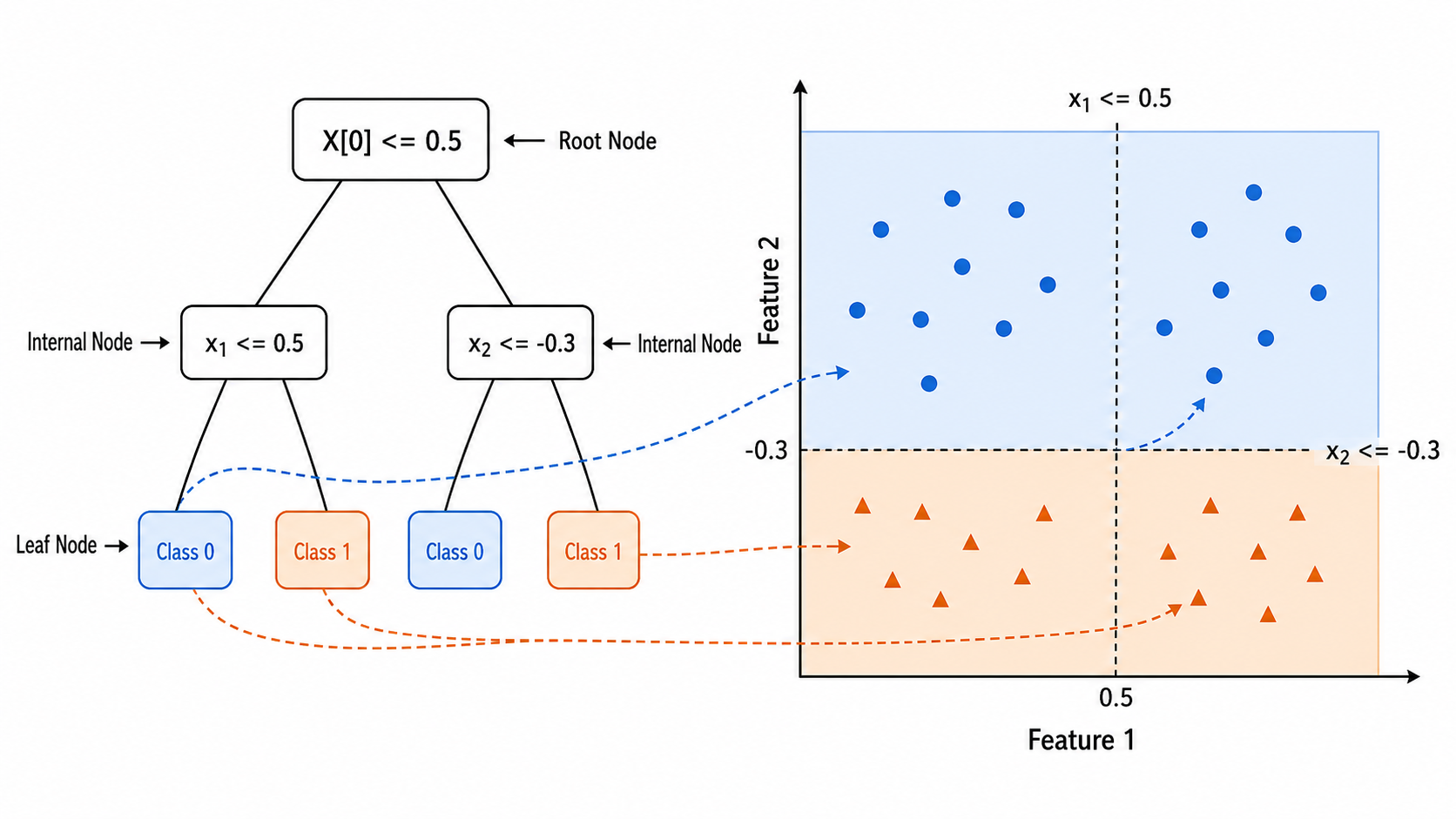
决策树(Decision Tree)是一种树形结构的预测模型,由一系列"如果...则..."规则组成。它通过递归地将数据空间划分为更小的矩形区域,直到每个区域内的样本足够"纯"。
一棵决策树包含三种节点:
- 根节点(Root Node):包含全部数据,选择最优特征进行首次划分
- 内部节点(Internal Node):每个节点选择一个特征和一个阈值,将数据分为左右两个子集
- 叶节点(Leaf Node):终止划分的节点,存储预测值(分类:多数类标签;回归:均值)
决策树的核心优势:可解释性。一棵决策树可以直接翻译成人类可读的规则列表("如果年龄 < 30 且收入 > 5 万,则批准贷款"),这是深度学习模型难以做到的。
1.2 决策树的学习过程
决策树的构建是一个贪心递归过程:
- 从根节点开始,选择最优特征和分割点,将数据分为两部分
- 对每个子节点递归执行步骤 1
- 直到满足停止条件(达到最大深度、节点样本数过少、纯度足够高)
核心问题:如何定义"最优"分割? 这由不纯度度量(Impurity Measure)来回答。
2. 三种分裂准则
设当前节点有
2.1 ID3:信息增益(Information Gain)
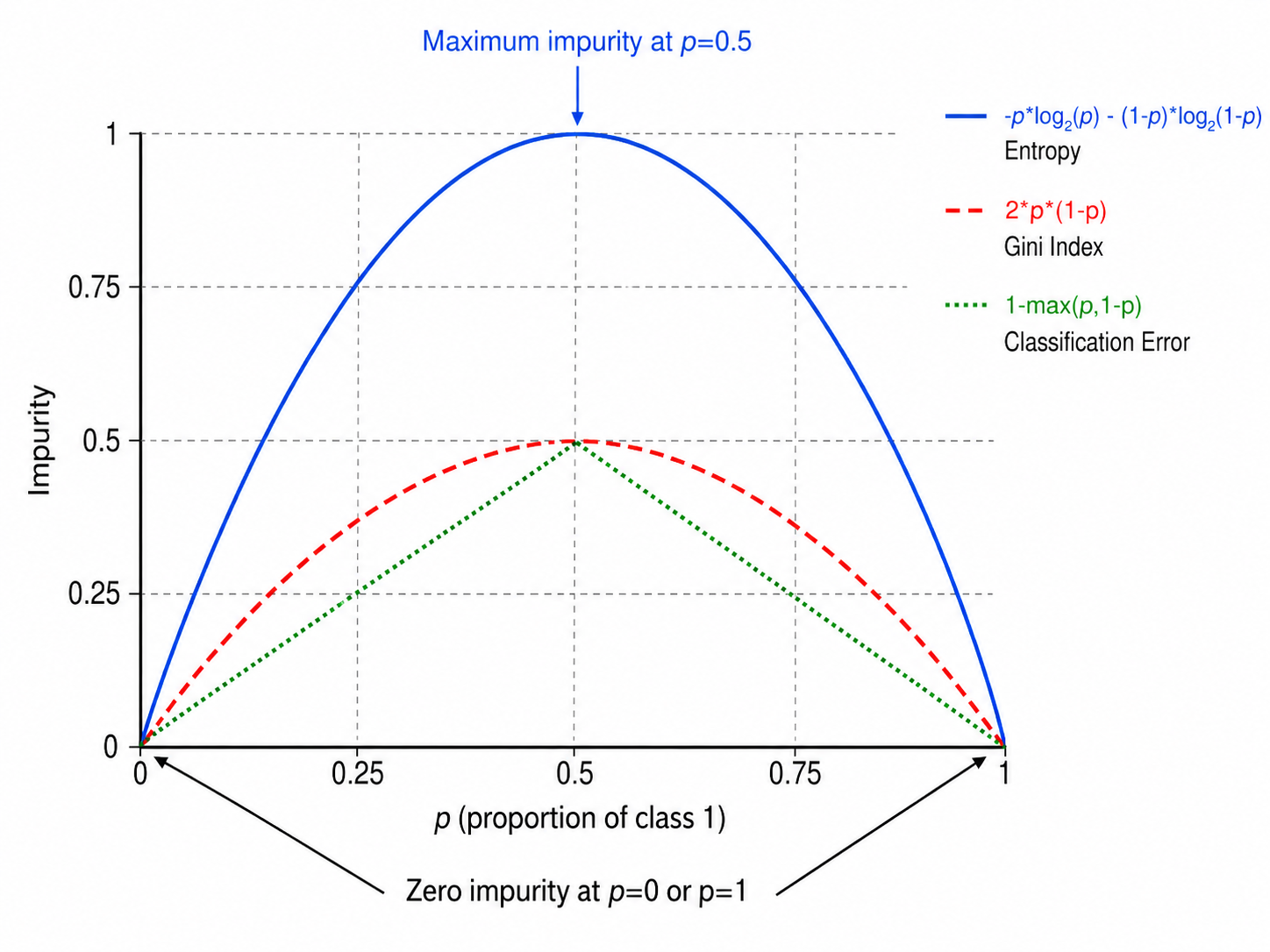
基于**熵(Entropy)**的不纯度定义:
其中
熵的直觉:
- 二分类,
: (最混乱,两个类别各半) - 二分类,
或 : (最纯净,全属于同一类)
熵度量的是不确定性:熵越高,数据越混乱;熵越低,数据越纯净。物理中,熵代表系统的无序程度——决策树借用了这个概念。
信息增益定义为分裂前后熵的减少:
选择使信息增益最大的特征和分割点进行分裂。ID3 只支持离散特征(因计算熵时需要每个取值的统计)。
ID3 的问题:天然偏好取值较多的特征。例如"身份证号"作为特征时,每个样本独自分到一个节点,信息增益极大但毫无泛化能力。
2.2 C4.5:增益率(Gain Ratio)
C4.5 改进了 ID3,使用**增益率(Gain Ratio)**来惩罚取值过多的特征:
其中
- 取值多的特征(如身份证号)→ SplitInfo 大 → 增益率小 → 不会被过度偏好
- C4.5 还改进了连续值的处理(多路划分)和缺失值处理
2.3 CART:基尼指数(Gini Index)
分类与回归树(Classification and Regression Tree, CART)使用基尼指数:
基尼指数衡量的是:从数据集中随机抽取两个样本,它们属于不同类别的概率。基尼指数越小,数据越纯净。
对于二分类,
这是一个关于
CART 的分裂收益:
选择使
2.4 三种准则的比较
| 准则 | 公式 | 算法 | 特点 |
|---|---|---|---|
| 信息增益 | ID3 | 偏好多值特征 | |
| 增益率 | IG / SplitInfo | C4.5 | 矫正 ID3 的偏好 |
| 基尼指数 | CART | 二分类;计算更简单 |
在实际使用中,CART 是最广泛使用的决策树算法(scikit-learn 的 DecisionTreeClassifier 默认使用基尼指数或熵)。
3. 剪枝:防止过拟合
3.1 为什么决策树容易过拟合
不加限制的决策树可以一直生长到每个叶节点只包含一个样本——这棵树的训练误差为 0,但泛化能力接近于零。决策树是典型的高方差模型。
3.2 预剪枝(Pre-pruning)
在树生长过程中提前停止。常见的预剪枝条件:
- 最大深度(
max_depth):限制树的层数 - 最小样本数(
min_samples_split):节点样本数小于阈值时不继续分裂 - 最小叶节点样本数(
min_samples_leaf):分裂后任一子节点样本数小于阈值时不分裂 - 最小不纯度减少(
min_impurity_decrease):分裂收益小于阈值时不分裂
预剪枝的优点是效率高(不需要先生成一棵完整的大树再裁减),但可能会过于保守——一个看似"当前收益不大"的分裂可能引出后续更好的分裂(视野短浅效应)。
3.3 后剪枝(Post-pruning)
先让树充分生长,再从底向上评估是否要剪掉某个子树。
错误率降低剪枝(Reduced-Error Pruning):
- 将数据分为训练集和验证集
- 用训练集生成完整决策树
- 自底向上:对每个内部节点,尝试将其替换为叶节点(用多数类标签),若验证集准确率不降低则执行剪枝
代价复杂度剪枝(Cost-Complexity Pruning):CART 使用的剪枝方法。定义代价函数:
其中
4. 连续值与缺失值处理
4.1 连续特征的分割
对于连续特征,CART 的做法是:
- 对特征
的所有取值排序 - 在每两个相邻取值的中点处设置候选分割点
- 评估每个候选分割点的分裂收益(Gini 减少或 IG)
- 选收益最大的
对
无需做等距离散化或 binning——这是 CART 的一大优势。
4.2 缺失值处理
C4.5 和 CART 有不同的缺失值处理策略:
C4.5 的概率权重法:在训练时,当特征值缺失的样本到达某节点,将其按各分支的样本比例分配权重(分数传播);在预测时,同时探索所有分支,取加权结果。
CART 的代理分裂(Surrogate Split):为每个最优分裂找一个"代理"分裂——使用另一个特征,其分裂结果与最优分裂最相似(相关性最高)。当最优特征值缺失时,用代理特征代替。
在实际工具中(如 sklearn),缺失值由预处理阶段处理(填充均值/中位数/众数),或在训练时忽略缺失样本。
5. 从零实现 CART 决策树
5.1 核心数据结构
class DecisionTree:
class Node:
def __init__(self):
self.feature_idx = None # 分裂特征索引
self.threshold = None # 分裂阈值
self.left = None # 左子树
self.right = None # 右子树
self.value = None # 叶节点的预测值(多数类标签)
self.is_leaf = True
def fit(self, X, y):
self.root = self._build_tree(X, y, depth=0)
def _build_tree(self, X, y, depth):
# 停止条件
if 所有样本同一类别 or 深度达上限 or 样本数太少:
return Node(value=多数类标签)
# 选最佳分割
best_feat, best_thresh = self._best_split(X, y)
# 递归构建子树
left = self._build_tree(X_left, y_left, depth+1)
right = self._build_tree(X_right, y_right, depth+1)
return Node(feature_idx, threshold, left, right)5.2 最佳分割的搜索
def _best_split(self, X, y):
best_gain = -inf
for each feature j:
for each unique value as candidate threshold t:
左子集 = X[:, j] <= t
右子集 = X[:, j] > t
gain = Gini(parent) - w_L * Gini(left) - w_R * Gini(right)
if gain > best_gain:
记录 (j, t)
return best_feature, best_threshold查找最优分割的复杂度为
本章总结
| 概念 | 公式/描述 | 关键点 |
|---|---|---|
| 熵 | ||
| 信息增益 | ID3 的分裂准则 | |
| 增益率 | IG / SplitInfo | C4.5;惩罚多值特征 |
| 基尼指数 | CART 的分裂准则;计算效率高 | |
| 预剪枝 | max_depth, min_samples_* | 提前停止生长 |
| 代价复杂度剪枝 | 后剪枝;CART 标准方法 | |
| 连续值分割 | 相邻取值的 M=n/2 处 | 排序后逐个扫描 |
| CART 特性 | 二叉树拆分 | sklearn 默认实现 |
参考
- Quinlan, J. R. (1986). Induction of decision trees. Machine Learning, 1(1), 81-106. DOI: 10.1007/BF00116251 (ID3)
- Quinlan, J. R. (1993). C4.5: Programs for Machine Learning. Morgan Kaufmann. ISBN: 9781558602380
- Breiman, L., Friedman, J., Olshen, R. A., & Stone, C. J. (1984). Classification and Regression Trees. Wadsworth. ISBN: 9780412048418 (CART 的原始著作)
- Hastie, T., Tibshirani, R., & Friedman, J. (2009). The Elements of Statistical Learning (2nd ed.). Springer. DOI: 10.1007/978-0-387-84858-7 第 9.2 节
- Bishop, C. M. (2006). Pattern Recognition and Machine Learning. Springer. DOI: 10.1007/978-0-387-45528-0 第 14.4 节
- Loh, W. Y. (2011). Classification and regression trees. WIREs Data Mining and Knowledge Discovery, 1(1), 14-23. DOI: 10.1002/widm.8 (CART 综述)