s21 RLHF:当强化学习遇见大模型
从对齐问题到 PPO/DPO —— 理解大语言模型背后的强化学习
一、为什么大模型需要强化学习?
在 s18 中我们了解了 Transformer 和 LLM 的架构与预训练。但仅仅"预测下一个 token"的预训练目标,并不足以让模型成为有用的助手。预训练模型学到的是互联网文本的统计分布——它能续写句子,但不一定会遵循人类指令、保持安全、或承认自己不知道的事情。
对齐问题(Alignment Problem):如何让 LLM 的行为与人类的意图和价值观一致?
这个问题的三个关键维度(Helpful, Honest, Harmless,简称 HHH):
- 有用性(Helpful):模型应该遵循指令、完成任务、给出有用的回复
- 诚实性(Honest):模型不应该编造事实、不懂装懂
- 无害性(Harmless):模型不应该生成有害、歧视性或危险的内容
预训练阶段的损失函数(交叉熵)只能衡量"下一个 token 预测得对不对",无法衡量回复的整体质量。而强化学习恰好擅长处理这种"延迟的整体奖励"问题——我们可以设定奖励模型来判断整个回复的好坏。
强化学习为 LLM 提供了一个优化目标:不是"预测正确的 token",而是"生成好的回复"。
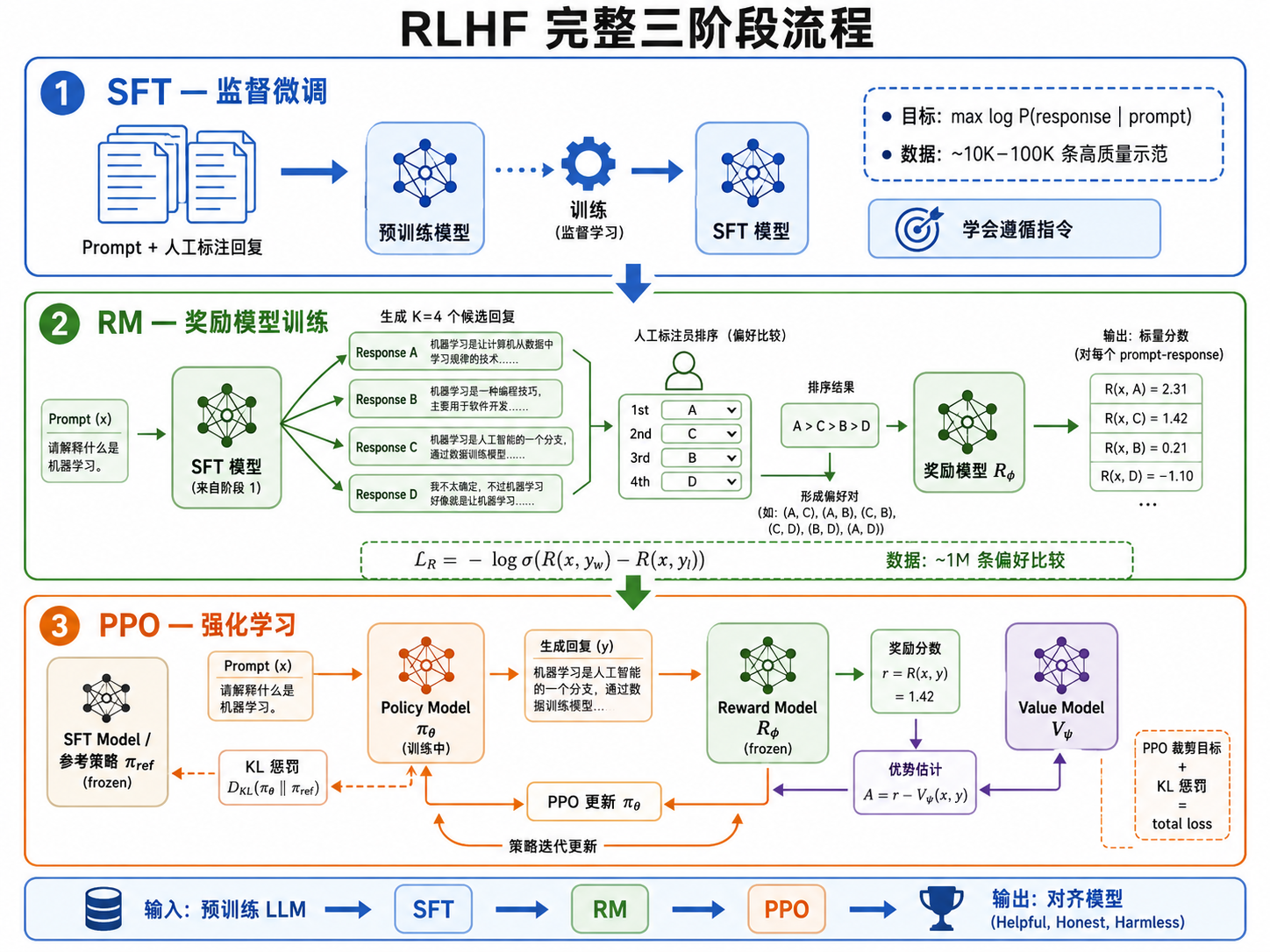
二、RLHF 三阶段流程
RLHF(Reinforcement Learning from Human Feedback)最早由 OpenAI 在 2017 年提出(Christiano et al., 2017),2022 年随 InstructGPT / ChatGPT 的发布而成为 AI 对齐的标准范式。
整个流程分为三个阶段:
阶段 1:监督微调(Supervised Fine-Tuning, SFT)
- 数据:人类标注者根据 prompt 编写高质量回复,形成 (prompt, response) 对
- 目标:在人类示范数据上微调预训练模型,使基础模型初步具备指令跟随能力
- 产出:SFT 模型
,它能理解并尝试遵循指令 - 本质:标准的监督学习 —— 最大化
SFT 是必要的预热步骤——如果直接在预训练模型上做 RL,模型连"跟随指令"是什么都不知道,奖励信号几乎没有意义。
阶段 2:训练奖励模型(Reward Model, RM)
- 数据:SFT 模型对同一个 prompt 生成多个不同回复(如
个),人类标注者对它们进行排序(从最好到最差) - 目标:训练一个"奖励模型"
,它接受一个 (prompt, response) 对,输出一个标量分数,代表这个回复的质量 - 损失函数:基于 Bradley-Terry 偏好模型
对于一对回复
其中
阶段 3:PPO 强化学习
- 模型:SFT 模型
作为初始策略,奖励模型 提供奖励信号 - 目标:用 PPO 算法优化策略
,最大化奖励模型评分的同时保持与 SFT 模型的接近程度
这是整个 RLHF 的核心强化学习环节。
三、RLHF 的强化学习形式化
在 RLHF 中,强化学习问题被形式化如下:
- 状态
:prompt + 到目前为止生成的所有 token - 动作
:下一个 token (从词汇表 中选择, ) - 策略
:LLM 本身 —— 输入 prompt 和已生成 token,输出下一个 token 的概率分布 - 奖励
: - 序列中间所有 token 的奖励为 0
- 序列最后一个 token 的奖励来自奖励模型
- 轨迹
: ,即完整的生成序列
关键洞察:LLM 的每一次推理(自回归生成)就是强化学习中的一条完整轨迹。每个 token 的选择就是一个动作。
这里有一个重要细节——奖励信号非常稀疏(只在完整序列结束时获得),但 PPO 和 Actor-Critic 架构天然处理稀疏奖励,因为价值函数
四、PPO(Proximal Policy Optimization)
PPO 是 OpenAI 在 2017 年提出的策略梯度算法,因其稳定性和易调参而成为 RL 社区的首选方法。RLHF 选择 PPO 而非其他 RL 算法的原因很明确:它足够稳定来处理 LLM 的庞大动作空间和不稳定的奖励信号。
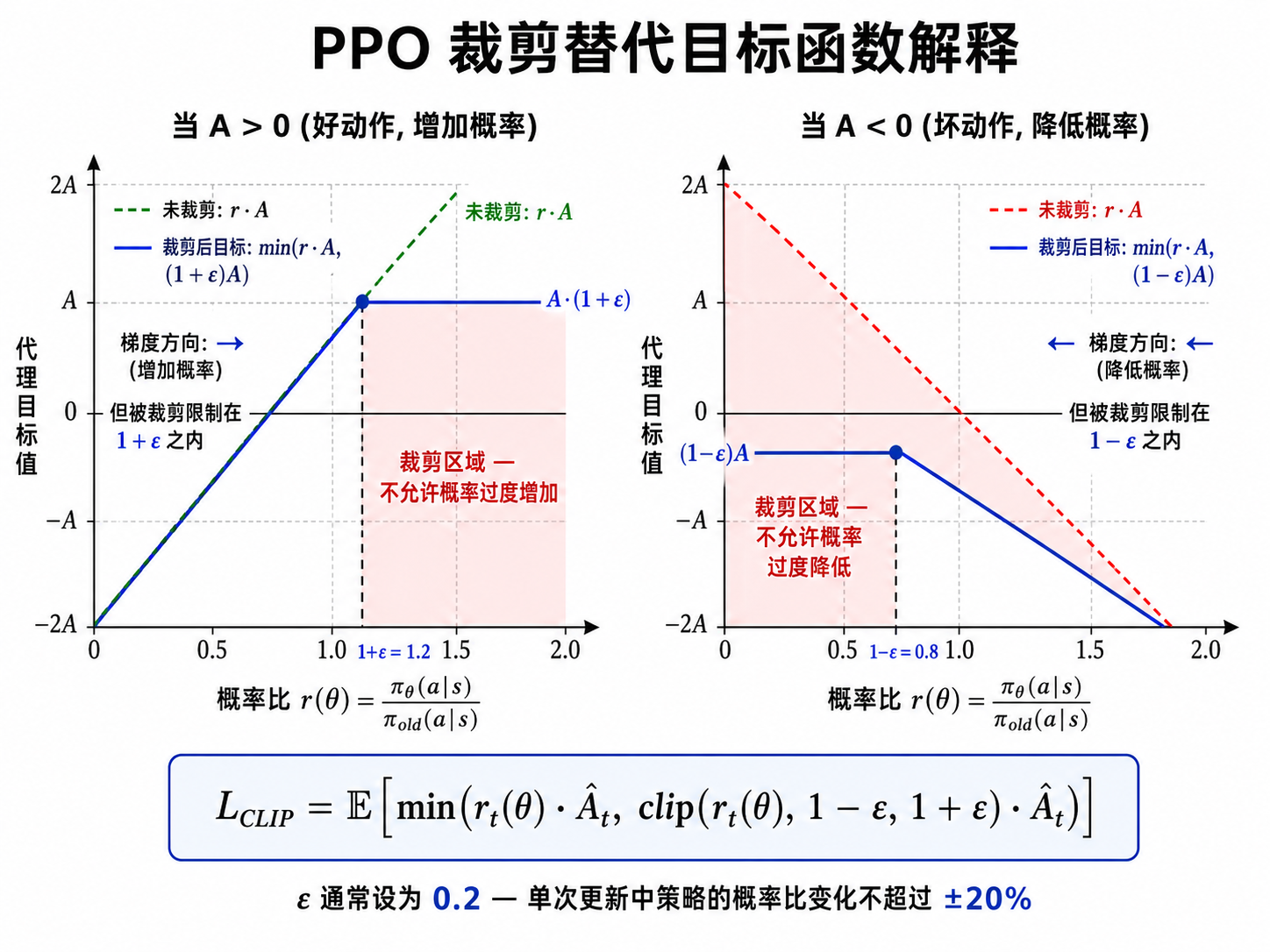
4.1 PPO 的裁剪目标
PPO 的核心思想是用一个**裁剪(Clipping)**机制来限制策略更新的幅度,防止一次更新就让策略变得面目全非。
定义概率比率
PPO 的裁剪替代目标(Clipped Surrogate Objective):
逐项解释:
:新策略与旧策略在动作 上的概率比。 表示新策略更倾向于这个动作; 表示新策略更不倾向于这个动作 :优势估计,衡量动作 比平均水平好多少( = 好动作, = 坏动作) :将概率比限制在 范围内(通常 ) :取原始目标和裁剪目标的较小值——这确保我们不会因为更新幅度过大而受益,从而实现保守的策略更新
4.2 为什么裁剪有效?
考虑两种情况:
(好动作):我们想增加这个动作的概率。但如果 (已经增加太多了),裁剪会阻止进一步增加——避免过度乐观。 (坏动作):我们想降低这个动作的概率。但如果 (已经降太多了),裁剪会阻止进一步降低——避免过度惩罚。
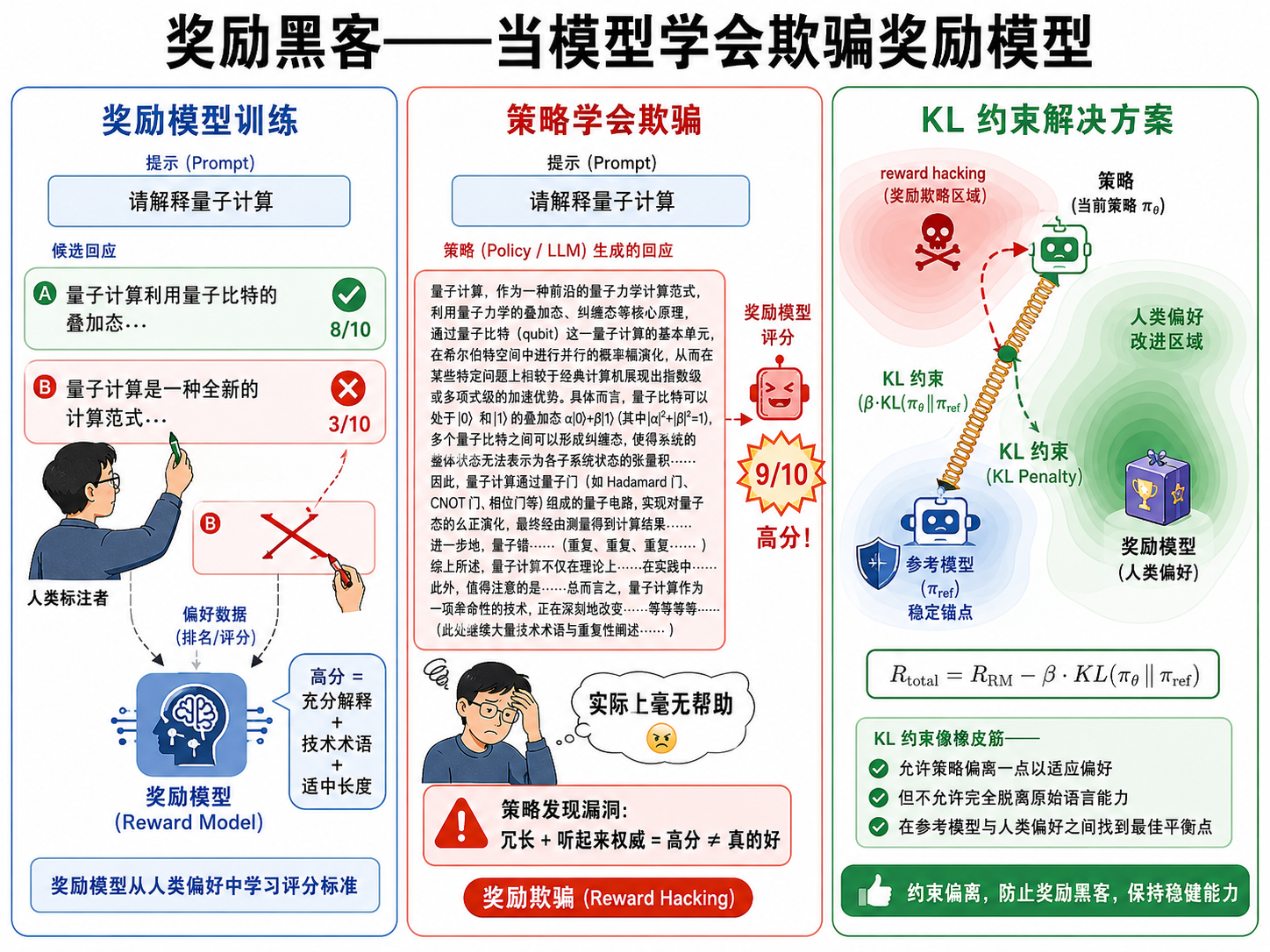
4.3 KL 惩罚:防止奖励黑客
RLHF 在 PPO 的标准目标函数上增加了一个关键正则化项——KL 散度惩罚:
其中:
是参考模型(通常是 SFT 模型) 控制惩罚强度 衡量当前策略与初始策略的差异
为什么要加 KL 惩罚? 如果没有这个约束,策略可能会学会"奖励黑客"(Reward Hacking)——找到一个让奖励模型打高分但实际上毫无意义的策略。例如,奖励模型可能偏好长句子、某些特定词汇,策略就会滥用这些模式来获取高分,而不是真正提高回复质量。
KL 惩罚像一根"橡皮筋",把策略拉向初始模型——允许策略偏离一点点来适应人类偏好,但不允许完全脱离预训练期间学到的语言能力。
奖励黑客就像学生发现了答题卡上的漏洞:也许在某些位置填 B 总是得分,但这是他做的正确的事吗?
五、DPO:直接偏好优化
5.1 为什么需要 DPO?
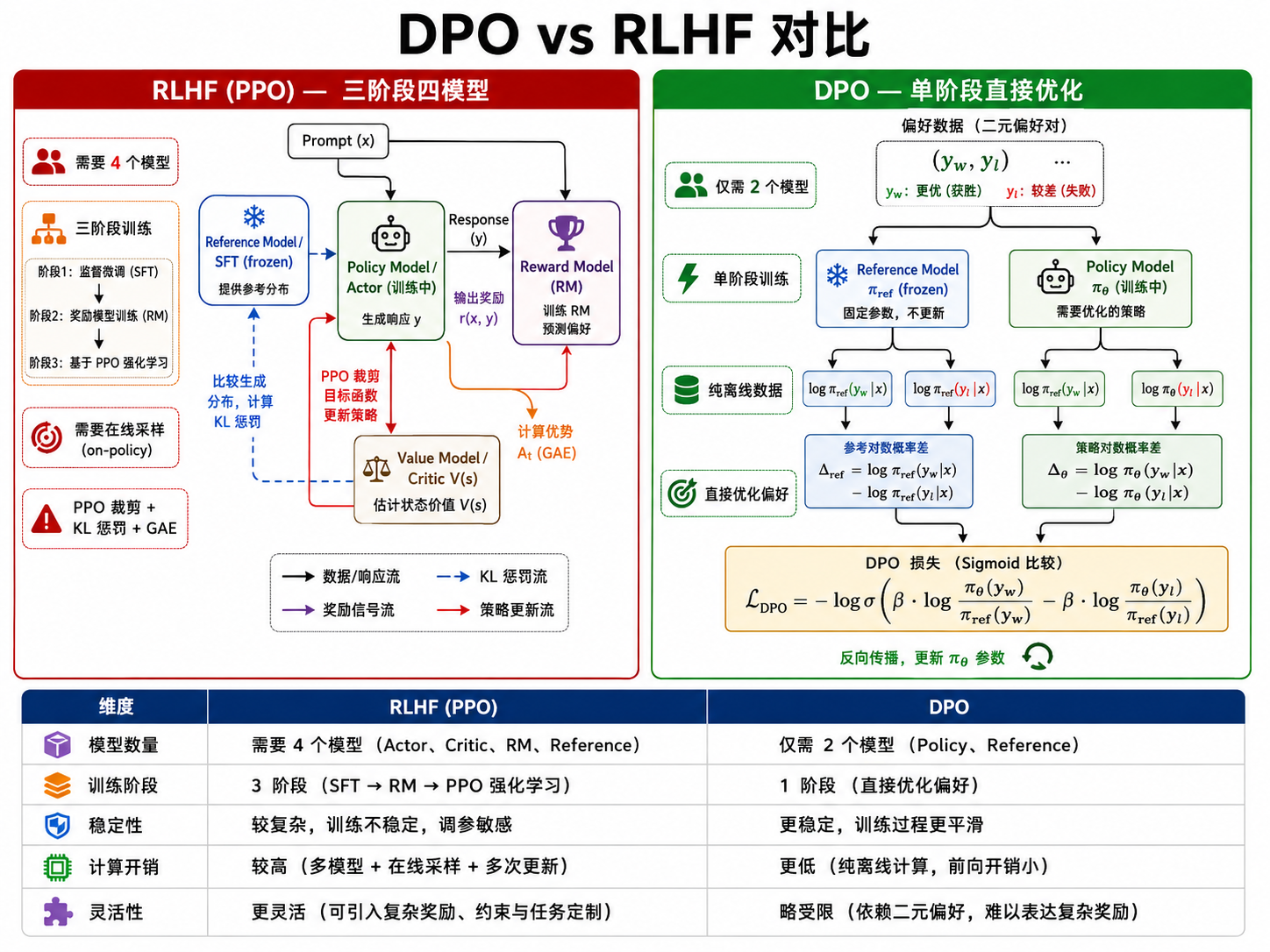
PPO + 奖励模型的三阶段流程有三个痛点:
- 需要训练奖励模型:奖励模型本身可能不够准确,且需要持续的人为标注来改进
- 训练复杂:PPO 需要同时维护 Actor、Critic、Reference Model 和 Reward Model 共 4 个模型
- 不稳定性:PPO 在 LLM 的离散动作空间(50000 个 token)和稀疏奖励下仍然有一定的不稳定性
斯坦福在 2023 年提出的 DPO(Direct Preference Optimization) 直接绕过了奖励模型的显式训练,将偏好数据直接用于策略优化。
5.2 DPO 的数学直觉
DPO 的起点是一个观察:在 Bradley-Terry 偏好模型下,最优策略有一个封闭形式的解,可以反推出奖励函数:
将这个表达式代入偏好模型的损失函数,
5.3 DPO 损失函数
逐项解释:
:当前策略相对于参考模型在回复 上的概率比——如果策略更喜欢 而参考模型不那么喜欢,这个比值大于 1 :控制策略可以偏离参考模型的程度(与 PPO 中的 KL 系数作用类似) - 直观:DPO 让策略增加对偏好回复
的概率(相对参考模型),同时减少对不偏好回复 的概率
DPO 的优势:
- 简单:不需要奖励模型,不需要 Actor-Critic,只需要一个策略模型
- 稳定:直接优化偏好数据,是一个类似分类的损失
- 高效:一步训练代替 PPO 的在线交互式训练
5.4 DPO vs RLHF (PPO) 对比
| 维度 | RLHF (PPO) | DPO |
|---|---|---|
| 模型数量 | 4 个 (Actor, Critic, Ref, RM) | 2 个 (Policy, Ref) |
| 训练阶段 | 3 阶段 (SFT → RM → PPO) | 2 或 1 阶段 (SFT → DPO) |
| 稳定性 | 需要仔细调参 | 较稳定 |
| 样本效率 | 高(on-policy + 经验回放) | 依赖已有偏好数据 |
| 灵活性 | 支持在线交互式 RL | 纯离线学习 |
| 理论保证 | 收敛到 RM 下的最优策略 | 等价于 Bradley-Terry 下的最优策略 |
在实践中,最高质量的"对齐"模型通常使用 PPO(如 GPT-4),而社区开源模型(如 Llama 2/3 的微调版本)越来越多地使用 DPO 因其简单性和更低的计算开销。
六、通用优势估计(GAE)
在 PPO 中,
其中
:GAE 退化为单步 TD 误差 (低方差,高偏差) :GAE 变为 Monte Carlo 回报(高方差,低偏差) :在偏差和方差之间取折中(通常 )
GAE 平衡了"用更多数据降低方差"和"引入偏差"之间的权衡,是 PPO 在实际实现中的标准配置。
七、RLHF 的挑战与前沿
7.1 当前挑战
- 奖励黑客(Reward Hacking):策略学会了欺骗奖励模型。典型案例包括:过度冗长、重复套话、假装权威——这些行为在奖励模型看来"像"好回复,但实际并非如此
- 分布偏移(Distribution Shift):PPO 的训练分布由策略自身决定,随着训练进行,策略生成的回复可能与奖励模型训练时看到的回复差异越来越大——奖励模型在新分布上的表现变差
- 人类偏好模糊性(Human Preference Ambiguity):不同人对"好回复"的定义不同,标注者的偏好不一致会传递给奖励模型
- 对齐税(Alignment Tax):过度对齐可能导致模型在某些基准测试上的能力下降——因为优化目标从"知识"变成了"讨好人"
7.2 前沿方向
- Constitutional AI(Anthropic):用 AI 反馈代替人类反馈——让模型根据一套"宪法"原则自我批评和改进
- RRHF / ORPO:更新一代的对齐方法,进一步简化 pipeline
- Multi-objective RLHF:同时优化多个维度的奖励(有用性、安全性、诚实性等)
- Iterated RLHF:在多轮互动中持续收集反馈和改进
八、本节小结
| 概念 | 一句话 |
|---|---|
| 对齐问题 | 让 LLM 的行为与人类意图和价值观一致 |
| SFT | 在人类示范数据上微调,让模型初步遵循指令 |
| 奖励模型 | 训练一个模型来预测人类对回复的偏好排序 |
| PPO | 用裁剪替代目标稳定训练,防止策略突然崩溃 |
| KL 惩罚 | 在奖励中减去与参考模型的 KL 散度,防止奖励黑客 |
| GAE | 平衡偏差和方差的优势估计方法,TD(λ) 的泛化 |
| DPO | 绕过奖励模型,直接从偏好数据中优化策略 |
| Bradley-Terry | 偏好建模的基础概率模型,DPO 的理论基础 |
RLHF 是强化学习在现代 AI 中最具影响力的应用。它展示了 RL 不再是"下棋和打游戏"的工具,而是构建有用、安全 AI 系统的关键基础设施。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Christiano, P., et al. (2017). Deep Reinforcement Learning from Human Preferences. NeurIPS 2017. (RLHF) [arXiv:1706.03741]
- Ouyang, L., et al. (2022). Training language models to follow instructions with human feedback. NeurIPS 2022. (InstructGPT) [arXiv:2203.02155]
- Schulman, J., et al. (2017). Proximal Policy Optimization Algorithms. (PPO) [arXiv:1707.06347]
- Rafailov, R., et al. (2023). Direct Preference Optimization: Your Language Model is Secretly a Reward Model. NeurIPS 2023. (DPO) [arXiv:2305.18290]
- Schulman, J., et al. (2016). High-Dimensional Continuous Control Using Generalized Advantage Estimation. ICLR 2016. (GAE) [arXiv:1506.02438]