s11 经典架构演进:从 LeNet 到 ViT
卷积神经网络架构 20 年进化史 —— 从 CNN 到 Transformer,每个里程碑解决了什么问题
一、LeNet-5 (1998):原型与范式
Yann LeCun 在 1998 年提出的 LeNet-5 是第一个成功的卷积神经网络。它在 MNIST 手写数字识别上取得了商业级的效果,被美国银行用于支票数字识别。
架构:Conv → Pool → Conv → Pool → FC → FC
LeNet-5 建立了 CNN 的基本范式,至今仍在使用:
- 交替模式:卷积提取特征 + 池化降维,交替堆叠多次
- 卷积末接全连接:最后几层用全连接层做分类决策
- Tanh 激活函数:当时的标配(ReLU 还未流行)
LeNet-5 确立的核心原则
- 浅层提取局部特征(边缘、角点),深层组合成全局特征
- 池化提供平移不变性和降维
- 全连接层做最终的高层语义推理
LeNet-5 虽然简单(约 6 万参数),但它验证了梯度下降 + 反向传播可以端到端地训练多层 CNN,为后续所有工作奠定了基础。
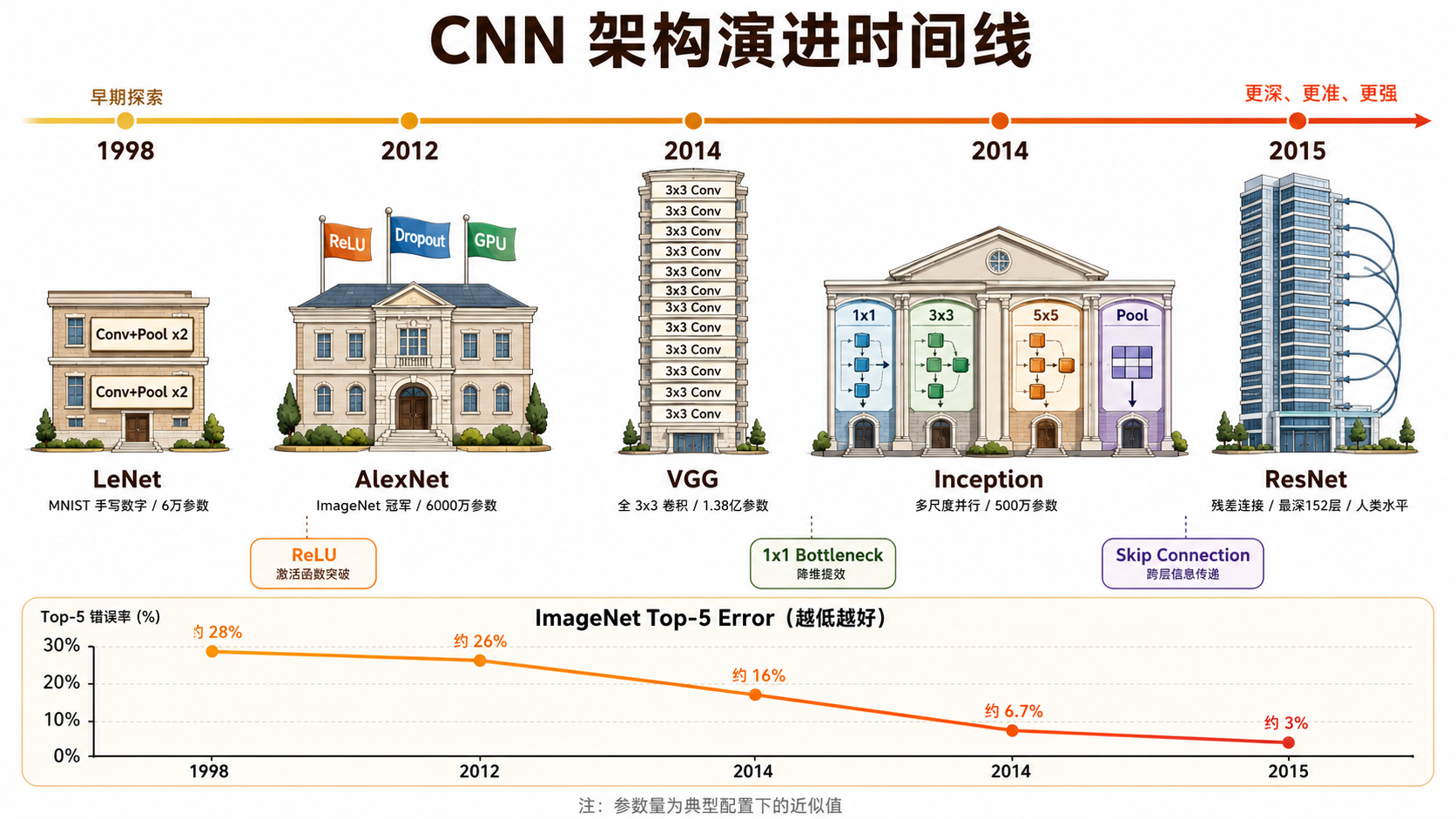
二、AlexNet (2012):ImageNet 引爆时刻
2012 年,Alex Krizhevsky 等人的 AlexNet 在 ImageNet 竞赛中将 top-5 错误率从 26% 降到 15.3%,一举夺冠。这个结果是深度学习革命的起点。
关键创新
| 创新 | 作用 |
|---|---|
| ReLU 激活 | 替代 tanh/sigmoid,解决深层网络的梯度消失问题,训练速度快 6 倍 |
| Dropout | 训练时随机丢弃 50% 神经元,强力防止过拟合 |
| 数据增强 | 随机裁剪、水平翻转、颜色抖动,增加有效训练数据量 |
| GPU 训练 | 首次在双 GPU 上并行训练大规模 CNN,开创 GPU 深度学习时代 |
| 局部响应归一化 | 相邻通道竞争机制(后被 BatchNorm 取代) |
架构特点
- 5 个卷积层 + 3 个全连接层(约 6000 万参数)
- 第一层使用
的大卷积核 + stride=4 - 两个 GPU 各负责一半通道
AlexNet 证明了三个关键命题:(1) 深度网络可以大规模训练,(2) 更大的数据和更深的网络带来更好的性能,(3) GPU 是训练深度学习模型的必要条件。
三、VGG (2014):简单即美
牛津大学 Visual Geometry Group 提出的 VGGNet 传达了一个极其简洁的理念:全部使用 3x3 卷积。
设计哲学:用深度替代复杂度
两个
卷积参数: (不含通道数因子) - 两个
卷积参数:
参数更少,非线性更多(两个 ReLU vs 一个 ReLU),网络更深。这是对"小而深的卷积核"优于"大而浅的卷积核"的有力论证。
VGG-16 和 VGG-19
VGG 的最常用变体是 VGG-16(13 个卷积 + 3 个全连接)和 VGG-19。它们的参数量主要堆积在最后三个全连接层(约 1.2 亿参数),这也是 VGG 的主要缺点——全连接层占据了绝大多数参数但贡献有限。
VGG 的教训:一味加深可以提升精度,但参数和计算量会暴涨。后续工作开始思考:如何在增加深度的同时控制参数?
四、GoogLeNet / Inception (2014):多尺度并行
Google 的 GoogLeNet(Inception v1)在 2014 年与 VGG 同年出现,走了一条完全不同的路:在同一层使用多种大小的卷积核并行处理,然后拼接结果。
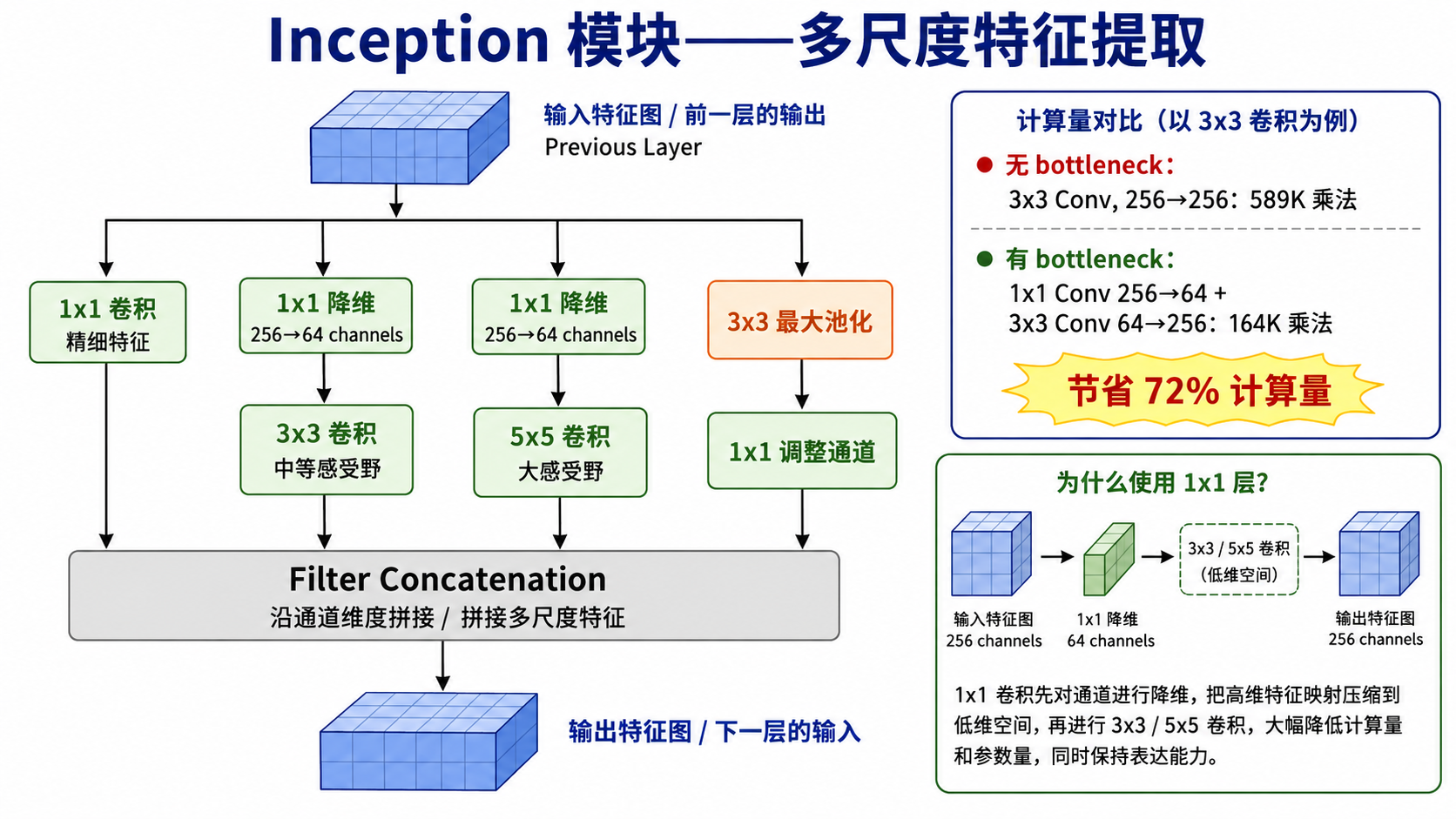
Inception 模块
一个 Inception 模块包含 4 条并行路径:
卷积 —— 捕捉精细局部特征 → 卷积 —— 中等感受野 → 卷积 —— 大感受野 最大池化 → 卷积 —— 池化特征
所有路径的输出沿通道维度拼接(concatenation),形成多尺度的特征表示。
1x1 卷积的降维魔法
在每个
- 没有 bottleneck:
conv 在 256→256 通道上: 次乘法 - 有 bottleneck:先
降维到 64,再做 : 次乘法
节省了 73% 的计算量,而表达能力几乎不损失。
GoogLeNet 约 500 万参数(不到 AlexNet 的 1/12),却更深更准,展示了"结构设计"对效率的巨大影响。
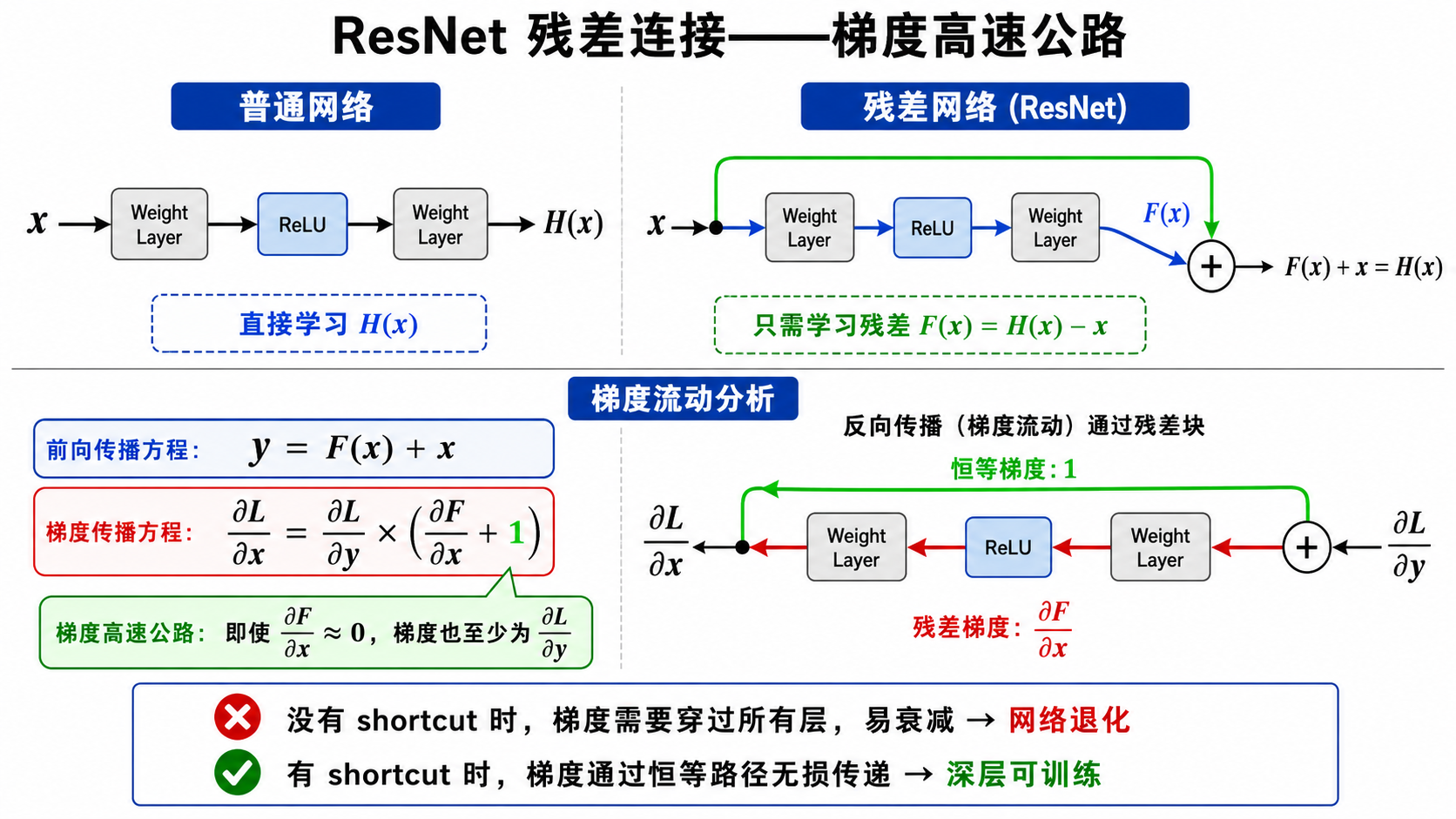
五、ResNet (2015):残差连接的革命
如果 VGG 证明了"更深更好",那么一个自然的问题是:为什么不能无限加深?答曰:网络退化(degradation)——层数加深后,训练误差不降反升。这不是过拟合(测试误差也会上升),而是优化困难。
残差学习
ResNet 的核心思想是残差学习:与其让
Residual Block:
其中
为什么残差连接有效?
从反向传播的角度看:设
注意那个 "+1" —— 即使
ResNet 变体
- ResNet-18/34:BasicBlock(两个
Conv + skip) - ResNet-50/101/152:Bottleneck Block(
→ → + skip),大幅降低计算量
ResNet-152 在 2015 年将 ImageNet top-5 错误率降到 3.57%,首次超过人类水平。
六、ResNet 之后:大道至简,各显神通
ResNeXt (2017):分组卷积 + 残差
在 ResNet 的 bottleneck 架构中引入 grouped convolution(分组卷积),用多分支的"基数"(cardinality)替代深度和宽度作为新的扩展维度。ResNeXt-101 以相近的参数量超越了 ResNet-200。
DenseNet (2017):极致连接
每一层的输出都连接到后面所有的层(在通道维度拼接),而非只加给下一层。公式:
这种密集连接实现了极深层的梯度流动和特征复用,但内存消耗较大。
SENet (2018):通道注意力
Squeeze-and-Excitation:在每个 residual block 中插入一个轻量级的通道注意力模块——全局平均池化 → FC → ReLU → FC → Sigmoid,学习一个通道权重向量,对特征图的不同通道进行加权。SENet 以极小的额外开销(~1% 参数增量)带来了可观的精度提升,获得了 ImageNet 2017 冠军。
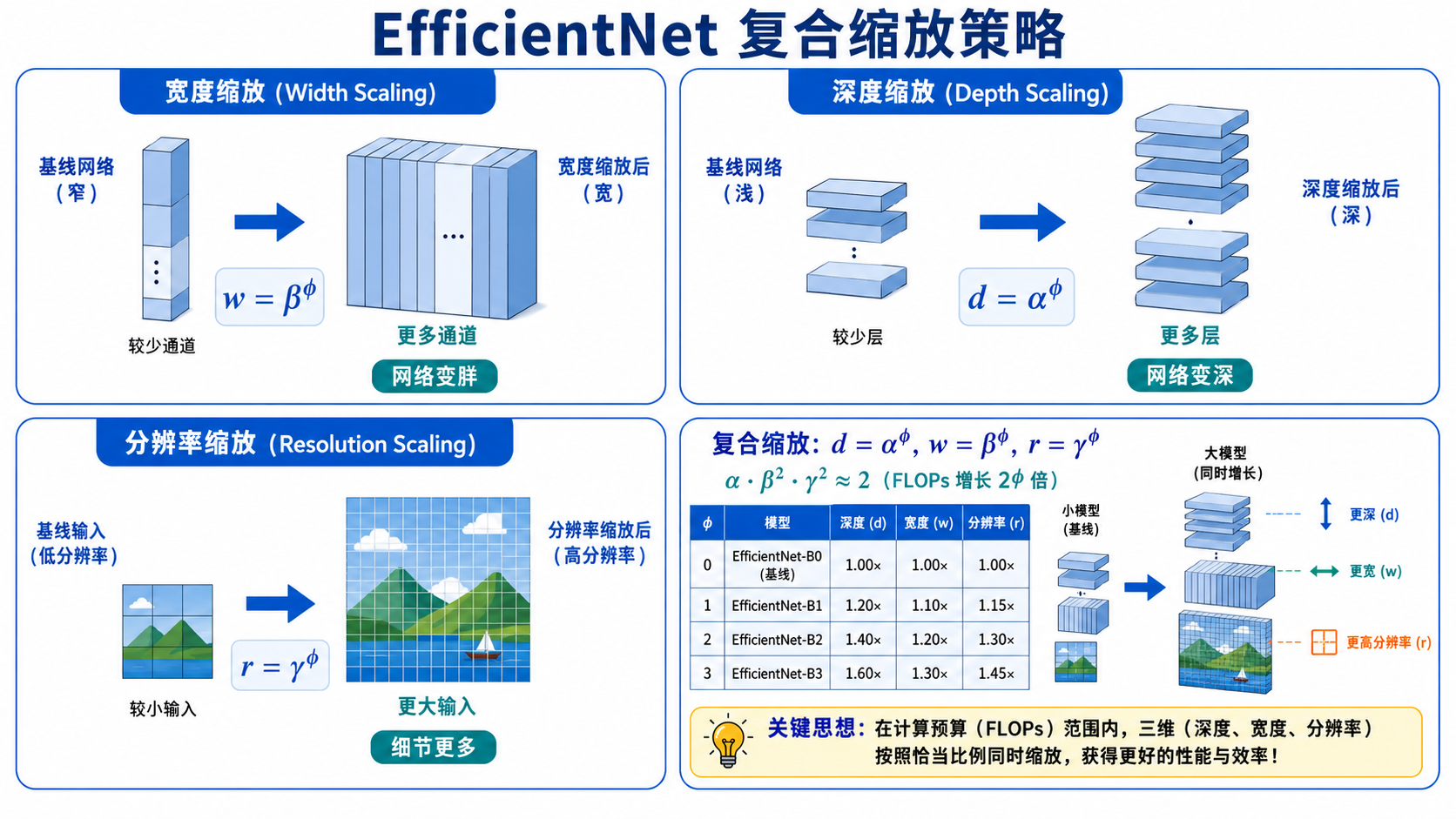
七、EfficientNet (2019):复合缩放
之前的网络通常只在一个维度上扩展——ResNet 加深,Wide ResNet 加宽,或者增加输入分辨率。EfficientNet 的核心洞察是:这三个维度应该协同缩放。
给定计算预算增加
其中
通过神经架构搜索(NAS)找到基础模型 EfficientNet-B0,然后用复合缩放生成 B1-B7,实现了当时最优的精度-效率 trade-off。
八、ConvNeXt (2022):Transformer 反哺 CNN
ConvNeXt 是一个有趣的"回旋":它从 ResNet-50 出发,逐步引入 Swin Transformer 的设计元素——更大的卷积核(
这说明了:好的网络设计原则是通用的,不限于某一类架构。CNN 和 Transformer 之间的界限正在模糊。
九、本节小结
| 架构 | 年份 | 核心创新 | 参数量 |
|---|---|---|---|
| LeNet-5 | 1998 | CNN 原型:Conv→Pool→FC | ~6 万 |
| AlexNet | 2012 | ReLU、Dropout、GPU 训练 | ~6000 万 |
| VGG-16 | 2014 | 全 3×3 卷积,极简设计 | ~1.38 亿 |
| GoogLeNet | 2014 | Inception 多尺度 + 1×1 bottleneck | ~500 万 |
| ResNet-50 | 2015 | 残差连接解决退化问题 | ~2550 万 |
| DenseNet | 2017 | 密集连接:每层连所有后续层 | ~800 万 |
| SENet | 2018 | 通道注意力:Squeeze-and-Excitation | ~2800 万 |
| EfficientNet | 2019 | 复合缩放:深度×宽度×分辨率 | ~530 万(B0) |
| ConvNeXt | 2022 | Transformer 设计反哺 CNN | ~2800 万 |
7. ViT:当 Transformer 遇见图像
2020 年之前,卷积几乎是处理图像的唯一选择。人们普遍认为卷积的局部连接和平移不变性是图像理解不可或缺的归纳偏置(inductive bias)。Google 的 Vision Transformer(ViT)打破了这个假设。
7.1 核心思想:图像 = 一序列 Patch
ViT 的洞见极其简单:把图像切成固定大小的 patch,每个 patch 当作 NLP 中的一个"词",扔进标准 Transformer 编码器。
具体流程:
- Patch Embedding:将
的图像切成 个 的 patch。每个 patch 展平后用线性层映射到 维向量 - Position Embedding:加上可学习的位置编码(1D,因为图像已变成序列)
- CLS Token:在序列开头拼接一个可学习的
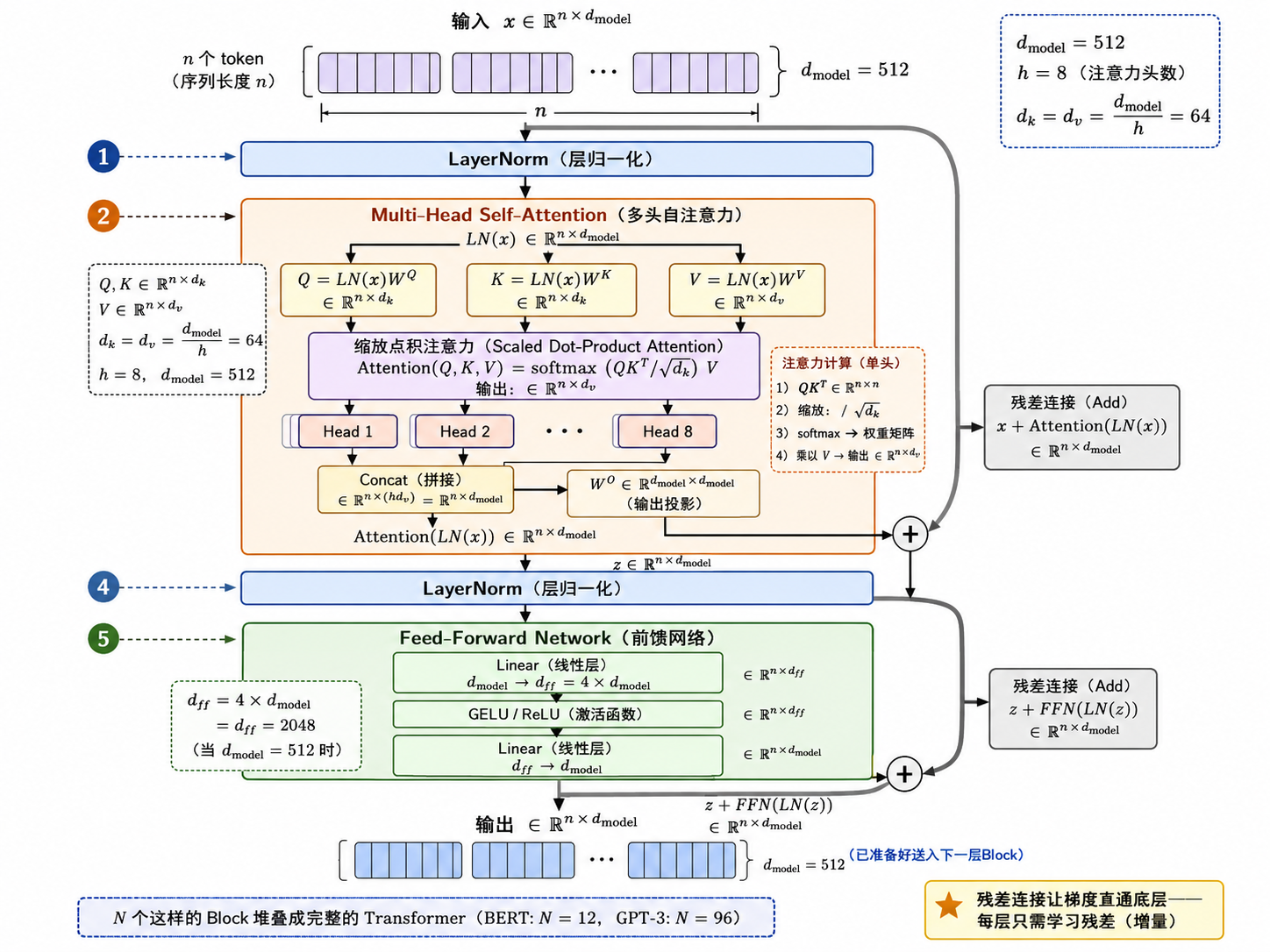
[CLS]token(类似 BERT),它的最终输出用于分类 - Transformer Encoder:标准的多层 Transformer(与 NLP 完全相同——多头自注意力 + MLP + 残差)
- MLP Head:取
[CLS]token 的输出,通过一个 MLP 输出分类结果
7.2 ViT vs CNN:归纳偏置的权衡
| CNN | ViT | |
|---|---|---|
| 局部性 | 内置(卷积核只看到局部) | 需要从数据中学习 |
| 平移不变性 | 内置(权重共享) | 需要从数据中学习 |
| 全局关系 | 需要堆叠多层才获得大感受野 | 第一层就能看到全局(自注意力) |
| 数据需求 | 少量数据也能工作 | 需要大量数据(或 ImageNet-21K 预训练) |
| 计算复杂度 |
关键发现:CNN 的归纳偏置(局部性、平移不变性)在小数据集上是优势,但在海量数据下反而成为限制——限制了模型学习更灵活模式的能力。ViT 用更多的数据换来了更强的表达能力。
7.3 ViT 的进化
| 模型 | 年份 | 关键创新 |
|---|---|---|
| ViT | 2020 | 纯 Transformer 做图像分类,需要大规模预训练 |
| DeiT | 2020 | 知识蒸馏训练 ViT,只用 ImageNet-1K 即可 |
| Swin Transformer | 2021 | 引入窗口注意力和层级结构,适配检测/分割 |
| PVT | 2021 | 金字塔结构 ViT,多尺度特征图 |
| MAE | 2021 | 掩码自编码器——像 BERT 一样随机 mask patch 然后重建 |
| DINO/DINOv2 | 2023 | 自监督 ViT,特征质量超越监督学习 |
7.4 为什么 ViT 重要
ViT 的意义不仅是又一个 SOTA 模型。它证明了一件事:Transformer 是一个通用计算原语——处理文本(GPT)、处理图像(ViT)、处理蛋白质(AlphaFold),底层用的都是同一个 self-attention 机制。这为 s22 中的多模态模型(CLIP、LLaVA)铺平了道路。
下一节 s12 目标检测 将介绍如何在这些 backbone 上加一个"检测头",让网络不仅知道"图像里是什么",还能回答"物体在哪里"。之后的 s12b Vision Transformer 将展示 Transformer 如何颠覆 CV。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012). ImageNet Classification with Deep Convolutional Neural Networks. NeurIPS 2012. (AlexNet) [doi:10.1145/3065386]
- Simonyan, K. & Zisserman, A. (2015). Very Deep Convolutional Networks for Large-Scale Image Recognition. ICLR 2015. (VGG) [arXiv:1409.1556]
- Szegedy, C., et al. (2015). Going Deeper with Convolutions. CVPR 2015. (GoogLeNet/Inception) [arXiv:1409.4842]
- He, K., Zhang, X., Ren, S., & Sun, J. (2016). Deep Residual Learning for Image Recognition. CVPR 2016. (ResNet) [arXiv:1512.03385]
- Xie, S., et al. (2017). Aggregated Residual Transformations for Deep Neural Networks. CVPR 2017. (ResNeXt) [arXiv:1611.05431]
- Huang, G., Liu, Z., van der Maaten, L., & Weinberger, K. Q. (2017). Densely Connected Convolutional Networks. CVPR 2017. (DenseNet) [arXiv:1608.06993]
- Hu, J., Shen, L., & Sun, G. (2018). Squeeze-and-Excitation Networks. CVPR 2018. (SENet) [arXiv:1709.01507]
- Tan, M. & Le, Q. V. (2019). EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. ICML 2019. [arXiv:1905.11946]
- Liu, Z., et al. (2022). A ConvNet for the 2020s. CVPR 2022. (ConvNeXt) [arXiv:2201.03545]
- Dosovitskiy, A., et al. (2020). An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. ICLR 2021. (ViT) [arXiv:2010.11929]