AI 全景图:从感知机到大模型
1. 什么是 AI?
人工智能(Artificial Intelligence,AI) 是计算机科学的一个分支,目标是让机器能够完成通常需要人类智能才能完成的任务——理解语言、识别图像、下棋、驾驶汽车、回答问题等。从广义上讲,任何让计算机模仿人类智能行为的技术都属于 AI 范畴。
然而,术语「AI」在不同语境下有不同含义。为了准确地理解这个领域,我们需要先厘清三个核心概念的关系:AI、机器学习、深度学习。
AI vs. ML vs. DL
人工智能(AI):最宽泛的概念,涵盖所有让机器表现智能的方法。这既包括基于规则的专家系统(如「如果发烧且咳嗽,则诊断感冒」),也包括从数据中学习的现代方法。AI 的起源可以追溯到图灵 1950 年提出的著名问题:「机器能思考吗?」
机器学习(Machine Learning,ML):AI 的一个子领域,核心思想是不显式编程规则,而是让机器从数据中自动学习规律。Arthur Samuel 在 1959 年给出了经典定义:「使计算机能够在没有明确编程的情况下学习的研究领域」。例如,与其手工编写「如果图像中某处有圆形,且有胡须,则是猫」这样的规则,我们让算法从大量标注好的猫狗图片中自动发现区别。
深度学习(Deep Learning,DL):ML 的一个子集,使用多层(深层)人工神经网络作为模型。灵感来自生物神经系统,每一层学习不同抽象层次的特征表示。深度学习在 2012 年 ImageNet 竞赛中大放异彩(AlexNet),之后在图像识别、语音识别、自然语言处理等领域取得了突破性进展。
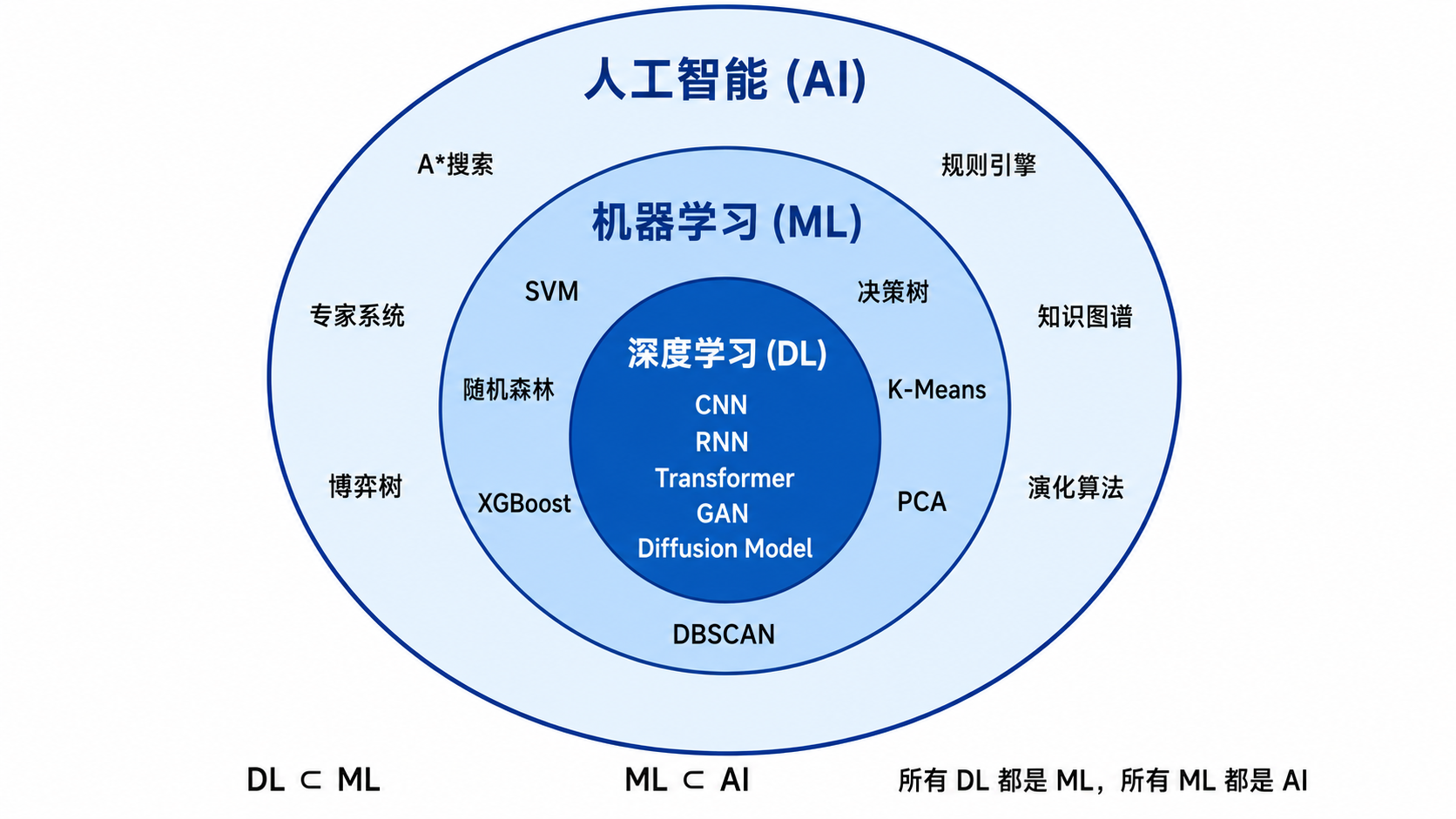
所有的深度学习都是机器学习,所有的机器学习都是 AI;但反过来不成立。
一个简单例子:在你的手机相册中,人脸识别使用的是 DL(CNN 网络),邮件垃圾过滤可能使用 ML(朴素贝叶斯),而相册里的「自动创建相册」功能可能混合了规则(时间、地点)+ ML(场景识别)+ DL(人脸聚类)。
2. 机器学习的三大范式
机器学习可以按训练数据的性质和任务目标分为三类。
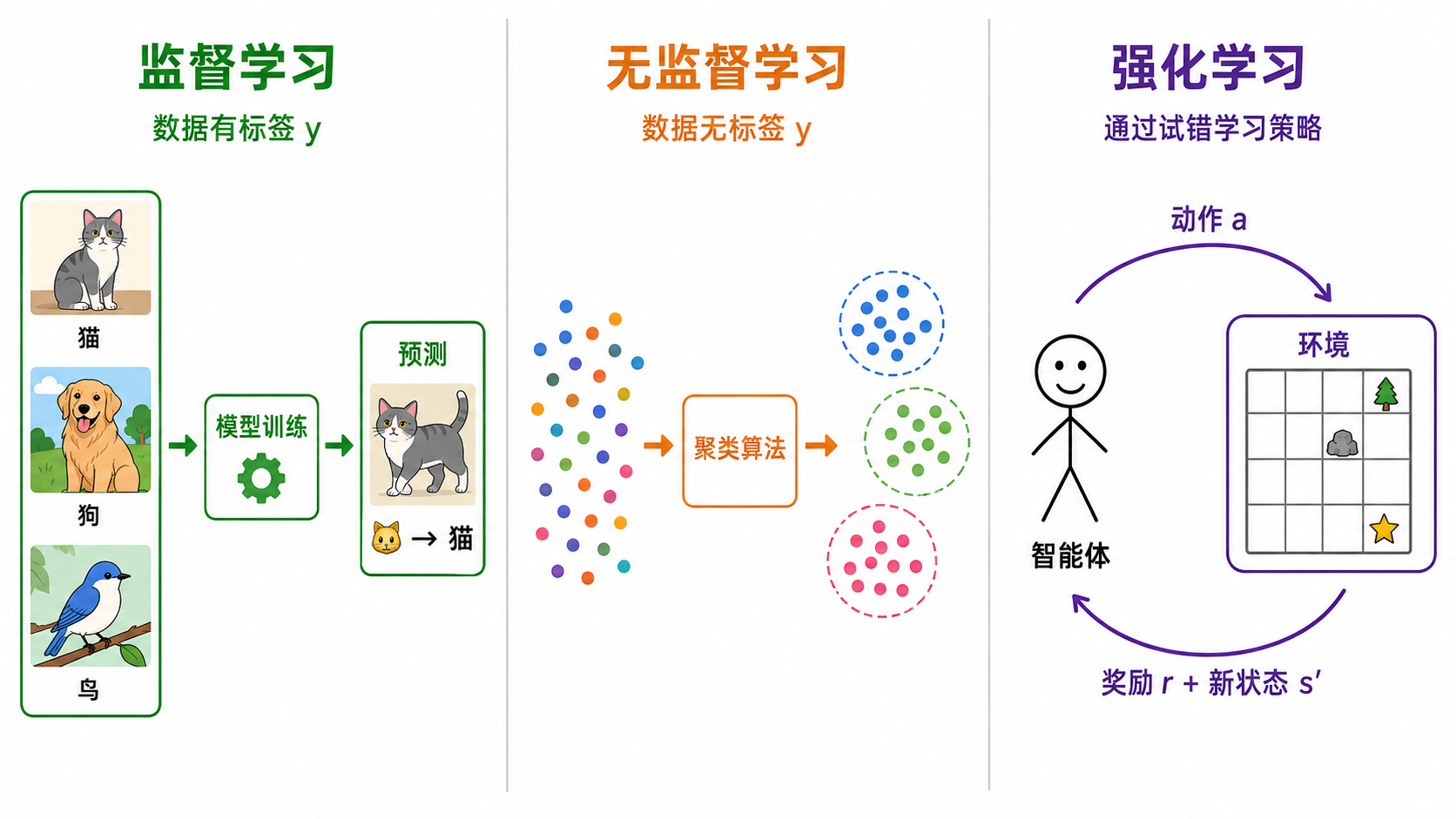
2.1 监督学习(Supervised Learning)
监督学习是我们有输入
典型任务:
- 分类(Classification):预测离散类别。例如:垃圾邮件检测(垃圾/正常邮件)、猫狗识别(猫/狗)、疾病诊断(良性/恶性)。
- 回归(Regression):预测连续数值。例如:房价预测(
)、股票价格、温度预测。
2.2 无监督学习(Unsupervised Learning)
无监督学习中,我们只有输入
典型任务:
- 聚类(Clustering):将数据分成若干组。例如:客户分群(高价值/中价值/低价值客户)、文档主题分类。
- 降维(Dimensionality Reduction):用更少的维度表示数据。例如:数据可视化(t-SNE、UMAP 将高维数据投影到 2D/3D 平面)、特征压缩(PCA)。
- 密度估计(Density Estimation):学习数据的概率分布。
2.3 强化学习(Reinforcement Learning)
强化学习中,**智能体(Agent)在环境(Environment)中通过试错(trial-and-error)**来学习最优策略。它与监督学习有本质区别——没有「正确答案」,只有「奖励信号」。
核心组件:
- 策略(Policy)
:在状态 下选择动作 的概率 - 价值函数(Value Function)
:从状态 开始的预期累积奖励 - Q 函数
:在状态 采取动作 后,一直遵循最优策略的预期累积奖励
典型例子:AlphaGo 下围棋、机器人行走、游戏 AI(Atari、Dota 2)、推荐系统优化长期用户留存。
3. AI 简史:从感知机到大模型
AI 的发展并非一帆风顺,经历了多次「冬天」与「春天」的交替。
3.1 萌芽期(1950s-1960s)
- 1950 年:图灵发表《计算机器与智能》,提出图灵测试
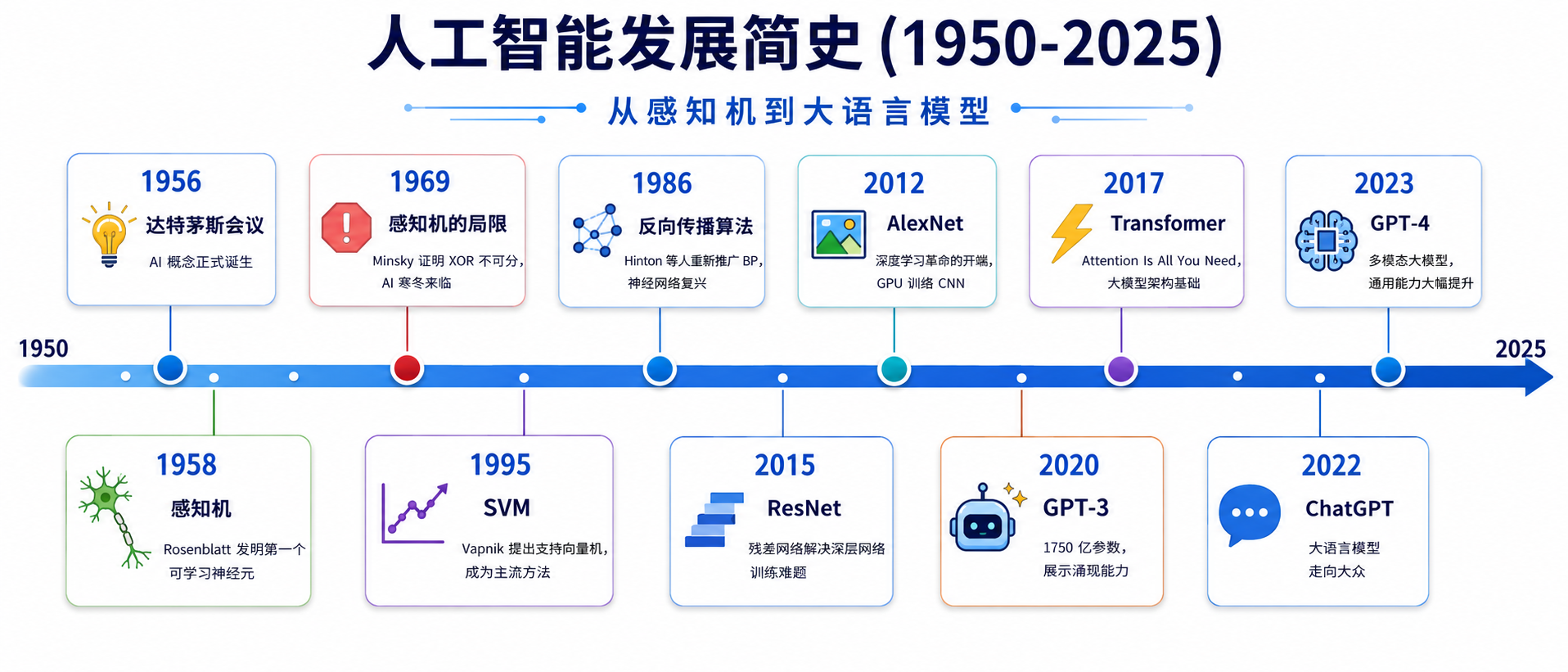
- 1956 年:达特茅斯会议,「人工智能」一词正式诞生
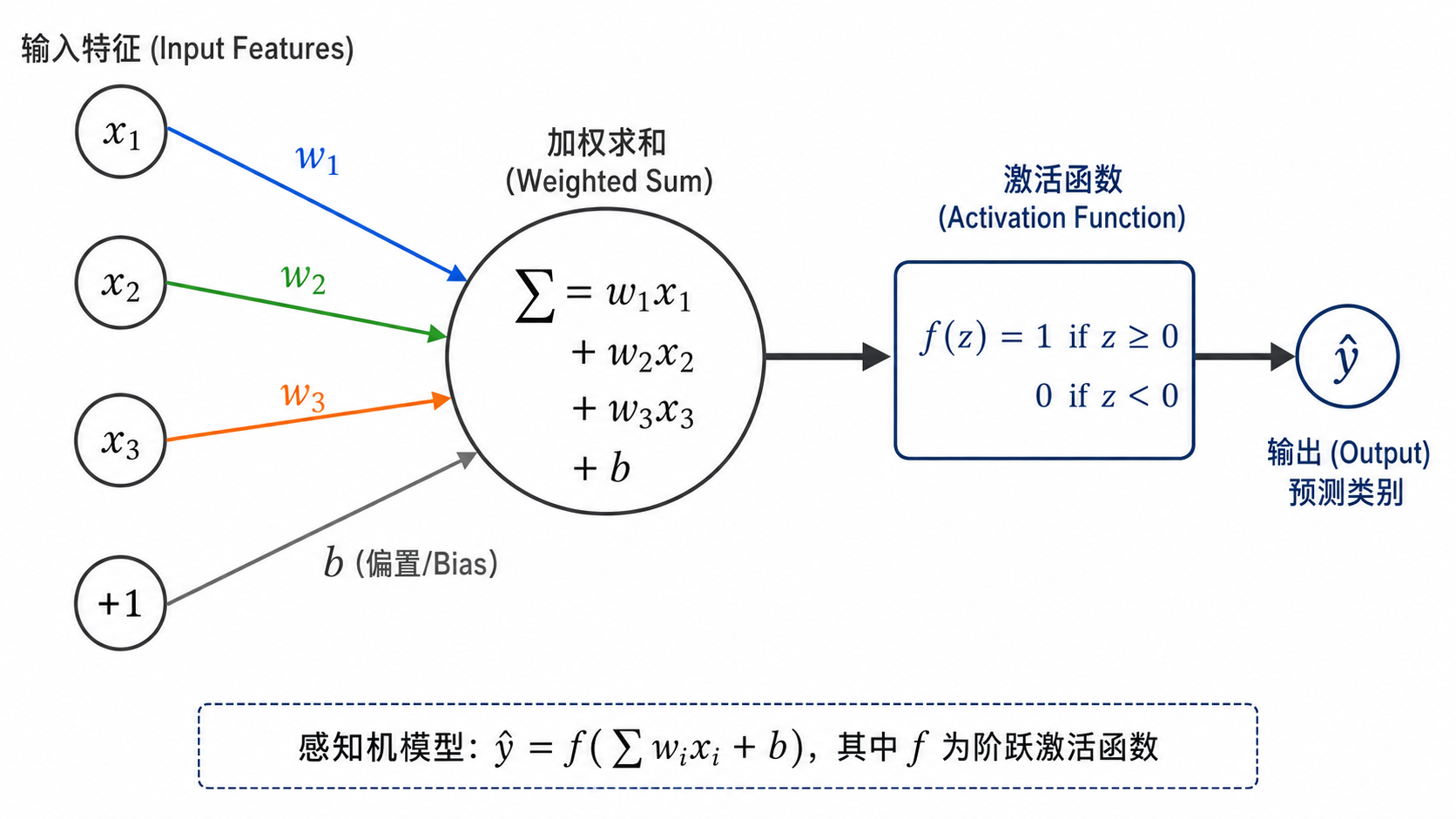
- 1958 年:Rosenblatt 发明感知机(Perceptron)——第一个可学习的人工神经元模型,能够进行简单的二分类。它是现代神经网络的鼻祖。
感知机的数学模型非常简单:
3.2 第一次 AI 寒冬(1970s)
- 1969 年:Minsky 和 Papert 出版《感知机》,证明了单层感知机无法解决 XOR 问题。由于 XOR 不可线性分割,而感知机只能解决线性可分问题,这直接导致了神经网络研究的停滞和资金断流。
3.3 复兴期(1980s-1990s)
1986 年:Rumelhart、Hinton 等人重新推广反向传播算法(Backpropagation),使得多层神经网络(即多层感知机 MLP)的训练成为可能。误差从输出层反向传播到输入层,逐层更新权重,从而解决了 XOR 等非线性问题。
1995 年:Vapnik 提出支持向量机(SVM),凭借强大的理论基础在小样本学习上碾压神经网络,成为 1990s-2000s 的主流方法。SVM 通过核技巧(kernel trick)将数据映射到高维空间,在低维线性不可分的问题中寻找高维超平面。
3.4 深度学习革命(2010s)
2012 年:Hinton 小组的 AlexNet 在 ImageNet 图像识别竞赛中以大幅优势夺冠,标志着深度学习时代的正式开启。关键因素:GPU 加速 + 大规模数据集(ImageNet) + ReLU 激活函数 + Dropout 正则化。
2015 年:ResNet(残差网络)通过引入跳跃连接(skip connection)解决了深层网络难以训练的问题,将网络深度推到了 152 层甚至 1001 层。核心思想:让网络学习残差映射
,而非直接学习目标映射 。 2017 年:Google 团队发表 「Attention Is All You Need」,提出 Transformer 架构。用**自注意力机制(Self-Attention)**替代 RNN 的序列计算,实现了并行训练和对长距离依赖的高效建模。这是大语言模型的基础。
3.5 大模型时代(2020s-至今)
- 2018 年:OpenAI 发布 GPT,BERT 发布。预训练 + 微调范式成为 NLP 标配
- 2020 年:GPT-3(1750 亿参数)展示出惊人的涌现能力(Emergent Abilities)——无需微调,仅通过提示(prompt)即可完成翻译、编程、推理等任务
- 2022 年:ChatGPT 发布,让全球用户第一次直接体验到大语言模型的能力。InstructGPT 通过 RLHF 对齐人类偏好
- 2023 年:GPT-4 支持多模态(文本 + 图像输入),能力大幅提升
- 2024-2025 年:开源模型(Llama 3、Mistral、DeepSeek 等)追赶闭源模型,o1/o3 等推理模型引入「思维链推理」
4. 「学习」的本质是什么?
当我们说一个模型在「学习」时,它究竟在做什么?本质上,学习 = 在数据驱动下,通过优化算法调整模型参数,使得模型在给定任务上的表现越来越好。
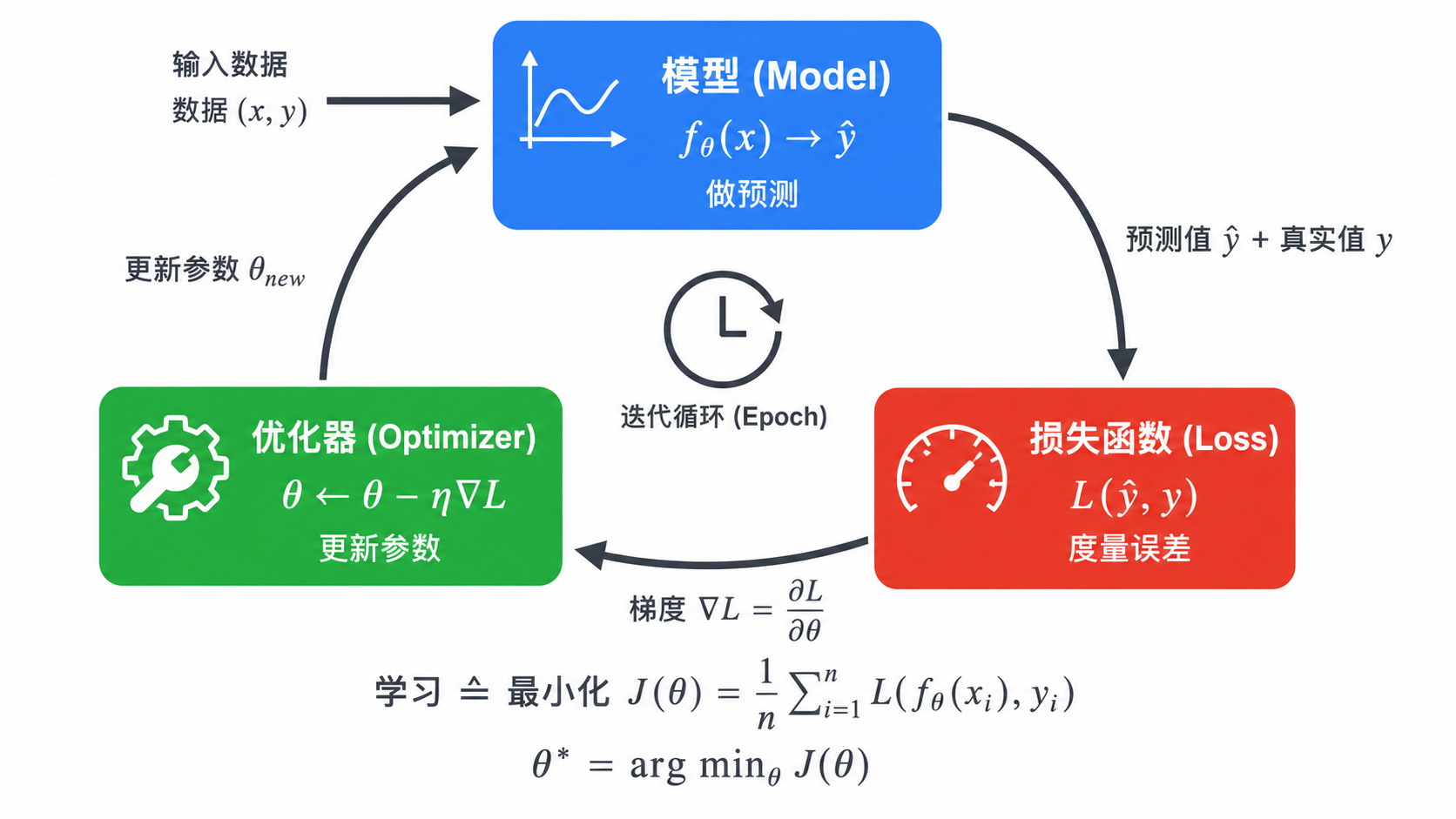
一个机器学习系统由三个核心组件构成:
4.1 模型(Model)
模型是一个带有可调参数
对于线性回归,
模型定义了**「我们能表达什么」**——即假设空间(hypothesis space)。
4.2 损失函数(Loss Function)
损失函数
不同的任务选用不同的损失函数(MSE 用于回归,交叉熵用于分类),因为损失函数决定了模型**「什么算好」**。
4.3 优化器(Optimizer)
优化器根据损失函数对参数的梯度
其中
学习的循环
数据 (x, y) → 模型预测 ŷ → 计算损失 L(ŷ, y) → 求梯度 ∂L/∂θ → 更新参数 θ → 返回第一步每一次完整遍历全部训练数据称为一个 epoch。这个循环重复数千甚至数百万次,参数逐步收敛到损失函数的(局部)最小值。
5. 为什么是现在?数据、算力、算法的三重奏
AI 之所以在近十年迎来爆发,是三大因素同时成熟的结果:
5.1 数据(Data)——「燃料」
- 互联网产生了海量数据:每天产生约
字节(3.28 EB) - ImageNet(1400 万张图像)、Common Crawl(PB 级文本)、大规模视频数据集为模型训练提供了「燃料」
- 数据的标注成本也在下降:众包平台(Amazon Mechanical Turk)、半自动标注工具
5.2 算力(Compute)——「引擎」
- GPU(图形处理器):原本为游戏渲染设计,2000 年代被发现在矩阵运算上远超 CPU。一块 A100 GPU 的浮点运算能力达 312 TFLOPS(FP16)
- 分布式训练:数据并行(Data Parallelism)、模型并行(Model Parallelism)、流水线并行(Pipeline Parallelism)使得训练万亿级参数模型成为可能
- 专用硬件:Google TPU、华为昇腾、专用 AI 芯片持续提升性价比
算力增长趋势:2010 年前 AI 训练算力大致遵循摩尔定律(每两年翻倍),而 2012 年后,用于训练最大 AI 模型的算力每 3.4 个月翻一倍。
5.3 算法(Algorithms)——「大脑」
- 激活函数:ReLU(
)解决了深层网络中的梯度消失问题 - 归一化:Batch Normalization、Layer Normalization 使训练更稳定迅速
- 残差连接:允许训练上百层的网络
- 注意力机制:Transformer 的自注意力使长序列建模成为可能
- 预训练范式:在大规模无监督数据上预训练,在小规模有监督数据上微调
- Scaling Laws:发现模型性能随参数、数据、算力的增加呈幂律增长
6. 今日 AI 全景图
当前 AI 领域可以按技术方向分为几个主要板块:
计算机视觉(Computer Vision)
- 图像分类、目标检测(YOLO 系列、DETR)、语义分割(SAM)
- 图像生成(Stable Diffusion、DALL-E 3、Midjourney)
- 视频理解与生成(Sora、Runway)
自然语言处理(NLP)
- 大语言模型(GPT-4、Claude、Gemini、Llama、DeepSeek、Qwen)
- 文本生成、翻译、摘要、对话
强化学习(Reinforcement Learning)
- 游戏 AI(AlphaGo、AlphaZero、AlphaStar)
- 机器人控制(Sim-to-Real)
- 大模型对齐(RLHF——从人类反馈中强化学习)
多模态(Multimodal)
- 图文理解(CLIP、BLIP-2、LLaVA)
- 文生图、文生视频
- 跨模态检索
技术与基础设施
- 向量数据库(Pinecone、Milvus、Chroma)
- 推理框架(llama.cpp、vLLM、TensorRT-LLM)
- 开源生态(Hugging Face、LangChain、LlamaIndex)
关键趋势
- Scaling 的边界:单纯扩大模型规模是否可持续?合成数据和推理时计算成为新方向
- AI Agent:从对话工具到自主完成任务的智能代理
- 开源 vs 闭源:社区驱动的创新与商业化的博弈
- AI 安全与对齐:如何确保越来越强大的 AI 系统与人类价值观一致
本章总结
从 1958 年的感知机到今天的大语言模型,AI 经历了 60 多年的起伏。理解这条发展脉络,不是为了背诵历史节点,而是为了理解每一次技术跨越背后的驱动力是什么——是数据?是算力?是算法创新?还是三者恰到好处的结合?
在接下来的章节中,我们将从最简单的模型开始,逐步构建起对现代 AI 系统的深刻理解。千里之行,始于感知机。
📥 Code
| File | View | Download |
|---|---|---|
| demo.py | Open | Download |
| exercise.py | Open | Download |
参考
- Rosenblatt, F. (1958). The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychological Review.
- Rumelhart, D. E., Hinton, G. E., & Williams, R. J. (1986). Learning representations by back-propagating errors. Nature. [doi:10.1038/323533a0]
- Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012). ImageNet Classification with Deep Convolutional Neural Networks. NeurIPS 2012. (AlexNet) [doi:10.1145/3065386]
- Vaswani, A., et al. (2017). Attention Is All You Need. NeurIPS 2017. [arXiv:1706.03762]
- Brown, T., et al. (2020). Language Models are Few-Shot Learners. NeurIPS 2020. (GPT-3) [arXiv:2005.14165]